
製品・技術サービス
福島復興・再生に向けて
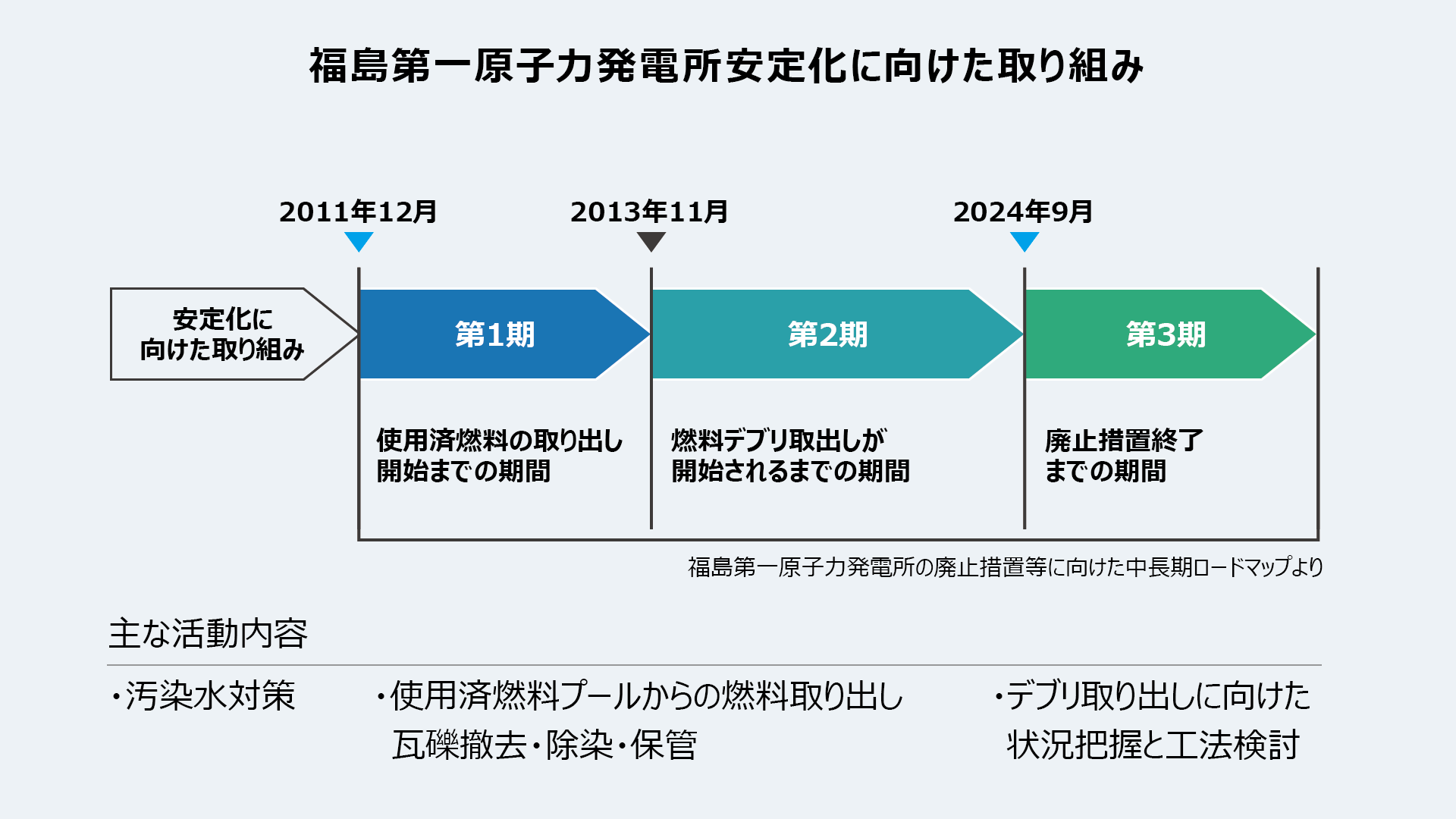


福島第一原子力発電所では、国と東京電力ホールディングス(株)が30~40年後の廃止措置終了に向けて中長期ロードマップ*1を策定し、「汚染水対策」「使用済燃料プールからの燃料取り出し」「燃料デブリ取り出し」「廃棄物対策」のそれぞれの分野において目標を設定しています。
私たちは、その目標を達成するために必要な課題を解決する技術の開発に取り組み、廃炉への協力支援を続けています。
*1:東京電力ホールディングス(株)福島第一原子力発電所の廃止措置等に向けた中長期ロードマップ
発電所内の汚染水対策
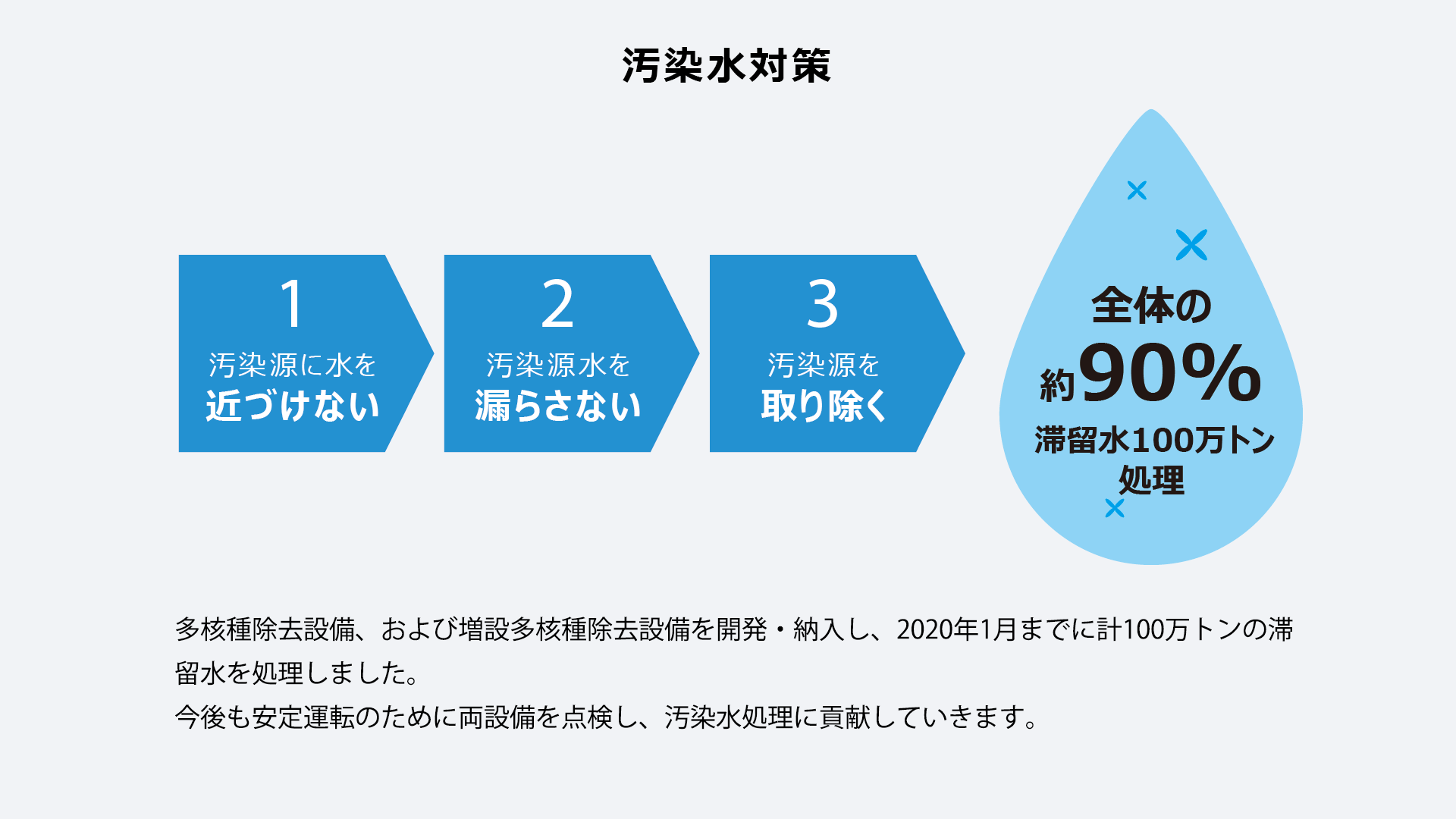
セシウムとストロンチウムを除去する、「SARRY™」
処理水中のセシウム除去装置を、米国や日本のパートナー企業と協力して開発し2011年8月から稼働しました。
その後、ストロンチウムの除去機能を追加して安定稼働を続け、汚染水処理に貢献しています。
※ SARRY™:Simplified Active Water Retrieve and Recovery System

62の放射性核種を除去する、Advanced Liquid Processing System(ALPS)
処理水中の、セシウム以外の62の放射性核種を、環境に影響がない濃度以下に除去する多核種除去設備(MRRS™、通称ALPS)を開発し2013年3月から稼働しました。
さらに増設多核種除去設備も開発しました。いずれも安定稼働を続け、汚染水処理に貢献しています。
※ MRRS™:Multiple Radio-nuclides Removal System
処理後の水を貯める、大容量溶接型タンク
漏えいリスクの少ない溶接型タンク設置を、東京電力ホールディングス(株)に提案しました。 工場組立型と現地溶接型を工期どおりに多数設置することで、汚染水処理の安定継続に貢献しています。

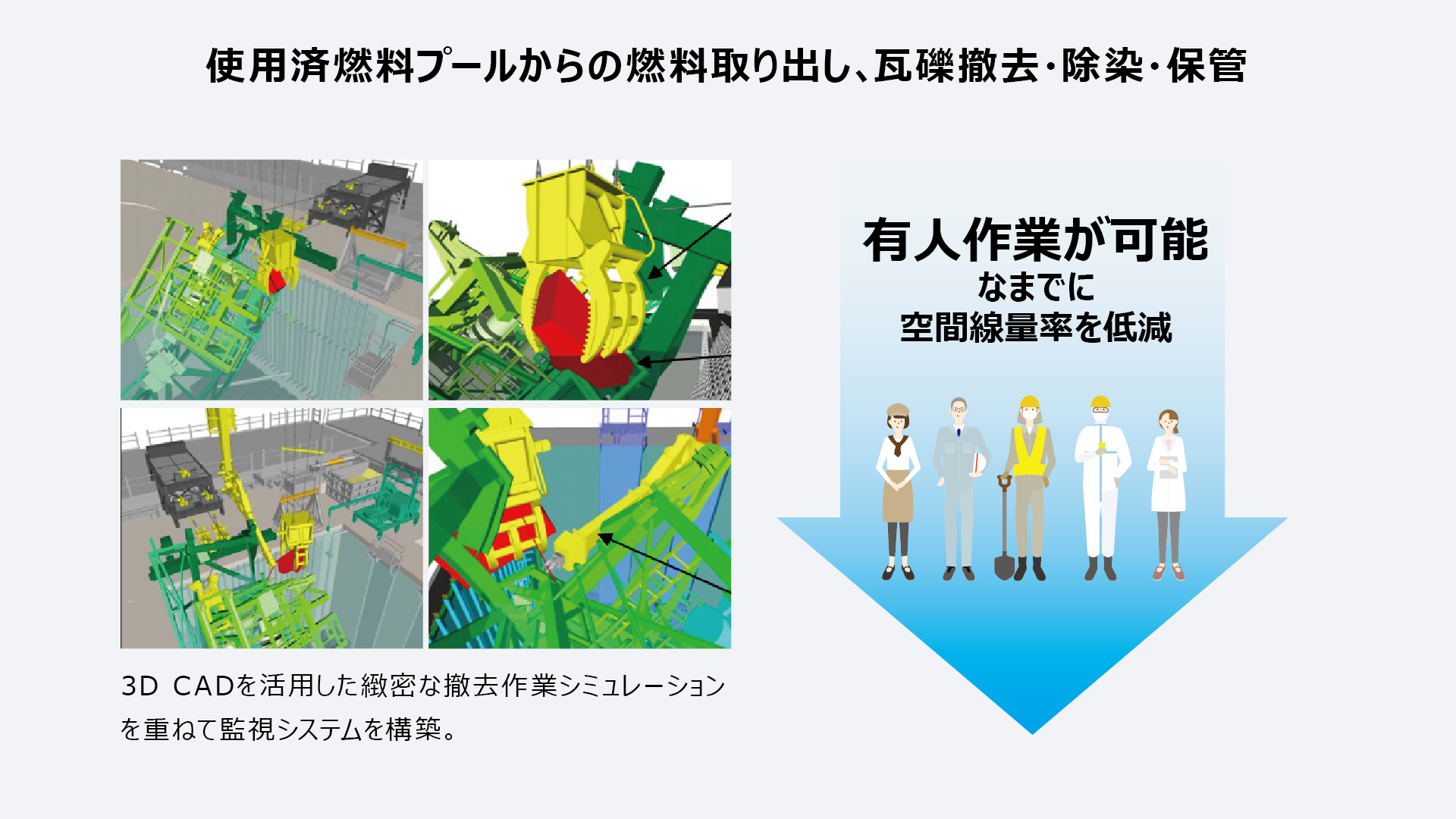
使用済燃料プールからの瓦礫撤去・燃料取り出し・除染
3次元CADモデルを用いた綿密な工法検討で達成した、3号機の瓦礫撤去
3号機使用済燃料プールには、大型瓦礫が散乱していました。大型の瓦礫を遠隔操作で確実に把持し安全に撤去するため、 撮影画像から3次元CADモデルを作成して作業シミュレーションを行ったうえで、遠隔操作可能な大型瓦礫撤去システムを構築しました。 これにより、2015年11月に瓦礫撤去を完了しました。

使用済燃料を取り出す、3号機の燃料取扱設備(Fuel Removal System)
3号機使用済燃料プール内の燃料の取り出しを行う設備を開発しました。 本設備は燃料取扱機とクレーンおよび付帯設備で構成されており、燃料を構内用輸送容器に収納した後、地上まで輸送することができます。 本設備を用いての燃料取り出し作業を2019年4月に開始し、2021年2月に566体全ての燃料の取り出しを完了しました。
汚染物質を効率良く除去する、ドライアイスブラスト除染装置*2
原子炉建屋1階の高所エリアを除染するロボットを開発し2016年1月から除染作業を開始しました。 低所エリア用の装置も開発しました。この技術は、汚染エリアにドライアイスを噴射してそのまま吸引することで二次廃棄物が発生することなく除染が可能です。

格納容器内外の状況把握
水中を遊泳できる、3号機原子炉格納容器内部調査ロボット*2
従来型で培った技術をベースにして、小型化・軽量化を行いました。 直径約14cmの貫通孔から進入し、冷却水が溜まっている原子炉格納容器内の下部を2017年7月に確認しました。
形状を変化できる、2号機原子炉格納容器内部調査ロボット*2
ロボット後方を反りあがらせて、周辺をLEDライトで照らしながら撮影し、走行中に倒れた場合でも、自力で復帰が可能です。
直径約11cmの貫通孔から進入し、原子炉格納容器下方への落下物や損傷の有無、状態などを2017年1月に確認しました。
パンチルト機能を備えた、2号機原子炉格納容器内部調査カメラ*2
ガイドパイプと約5mに伸長する伸縮式パイプの先端にぶら下がり、周辺をLEDライトで照らしながら遠隔操作により垂直方向120度、水平方向360度の撮影が可能です。
2018年1月に原子炉格納容器下部にて初めて燃料デブリの可能性の高い堆積物の撮影に成功しました。
フィンガ機構を持った 2号機原子炉格納容器内部堆積物調査装置
2018年1月の調査で使用した内部調査装置の先端ユニットを改造し、堆積物に接触し状態を調査するためのフィンガ機構を新たに追加しました。
2019年2月に初めて原子炉格納容器下部の堆積物への接触に成功しました。
模擬環境下でのデモ映像
障害物を避ける、4足歩行ロボット
障害物を乗り越えたり、段差の昇降を制御するアルゴリズムと多関節構造を独自に開発し、4足歩行を実現しました。
従来の車輪やクローラタイプのロボットでは到達が難しい場所での作業が可能です。2号機の原子力建屋内の状況を2013年3月に確認しました。
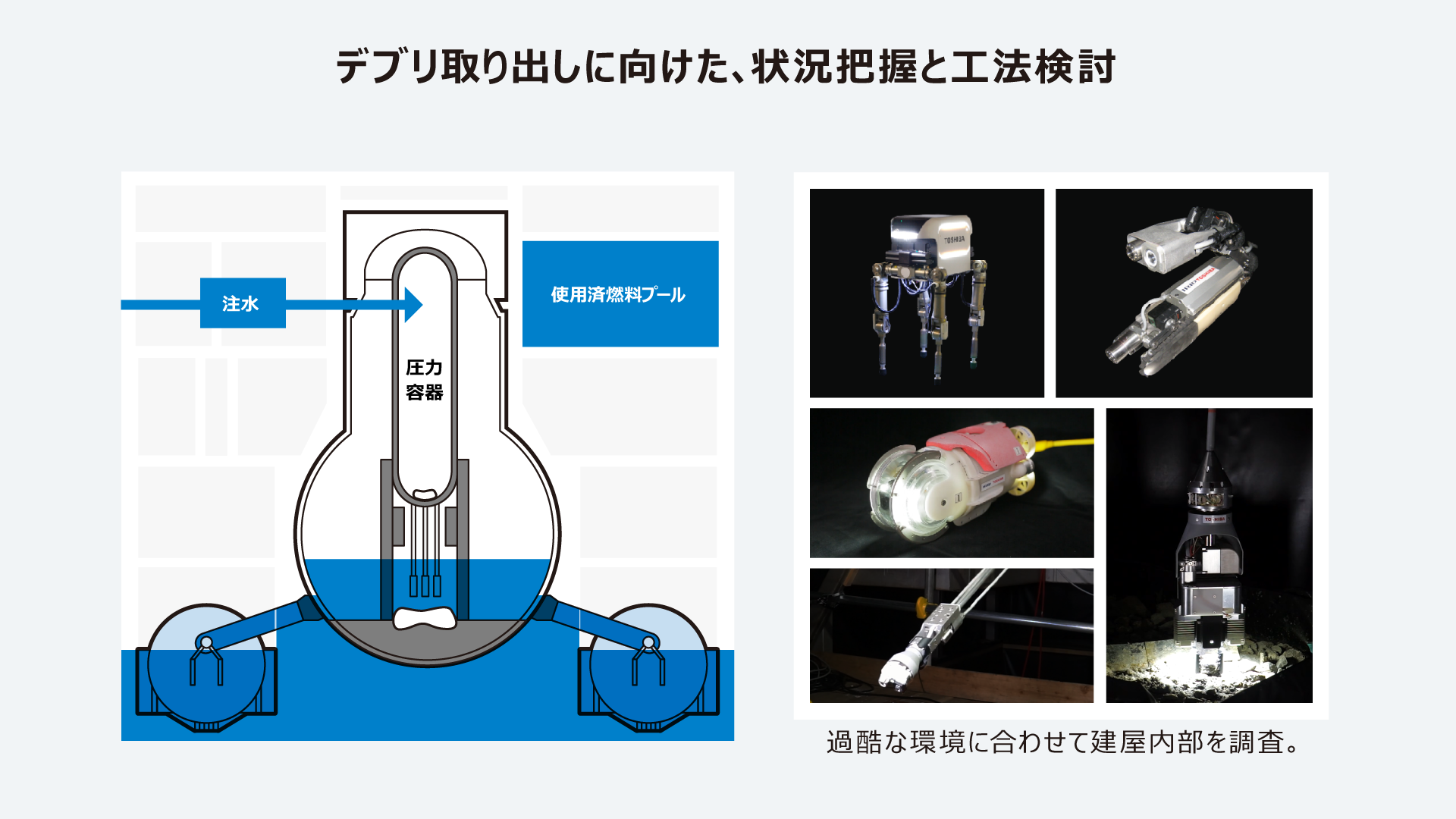
燃料デブリの状態把握、取り出し工法の検討
宇宙線を用いた燃料デブリの状態を測定する装置*2
宇宙から降り注ぐ宇宙線ミュオンが重い元素に散乱される特性を利用して、燃料デブリの位置を測定する装置を開発しました。
原子炉圧力容器の炉心の状態を、約30cmの分解能で把握できます。
※ ミュオン:高エネルギーの電子や陽子などが大気中の窒素や酸素と衝突し発生する宇宙線の一種。

燃料デブリを加工する、レーザガウジング技術*2
燃料デブリ取り出しの工法の一つとして開発しました。
水噴射とレーザ光照射を同軸で行うことで、気中・水中の両方で燃料デブリの表面を削り取ることができます。
*2: 国の「廃炉・汚染水対策事業費補助金」を活用(開発:技術研究組合 国際廃炉研究開発機構(IRID))



