
Toshiba to Commercialize Inspection Robots for Turbine Generators
~Providing Maintenance Services with Two Types of Robots according to Generator Designs~
- NEWS RELEASE
- Thermal Energy
- Nuclear Power
- R & D / Technology
October 12, 2022
Toshiba Energy Systems & Solutions Corporation
Kawasaki, Japan—Toshiba Energy Systems & Solutions Corporation (Toshiba ESS) announced that the company is conducting a full-scale launch of its inspection robot services for turbine generators used in power plants.
Toshiba ESS developed the inspection robots in 2018 and has been preparing for their commercialization. The company has made improvements and now offers a lineup of two types of inspection robots: “ultra-thin robots” that can be used not only for medium-to-big generators but also for small generators, and “multi-functional robots” that can overcome baffles*1 to provide a wide range of inspections for domestic and overseas power plants. The ultra-thin robots have already been used for inspection services at some overseas nuclear power plants and will now be used on a full-scale basis, while the multi-functional robots will provide inspection services in Japan and overseas from fiscal 2023.
In the past, specialized inspectors pulled the rotors from the stators every four years to conduct precision inspections of the turbine generators, but in order to improve the operating rates of the power plants, it is necessary to shorten the inspection periods and extend the inspection cycles of the generators, and there is a need to conduct high-precision inspections in a short period of time. In recent years, inspection techniques have been developed for generators using robots, but for generators with baffles attached to stators, the baffles have been a barrier to robotic inspections. Thus, these multi-functional robots have allowed for robot inspections of generators with baffles by having three arms protruding from the stator-side while running the robot by pushing it against the rotor. In addition, the development of nondestructive inspection technology that does not use a liquid contact medium has made it possible to inspect cracks in rotors without having to pull the rotors out of the stators.
Furthermore, Toshiba ESS has developed a thin-type inspection robot that enables inspections of small generators, which have been difficult to inspect in the past. The ultra-thin robots travel by magnetic attraction on the surface of the stator core and can be applied to generators without baffles. These ultra-thin robots are some of the thinnest in the industry, with a frame thickness of 10 mm (not including protrusions), making it possible to inspect generators with narrow structures, which is not possible with the 33-mm thickness of conventional multi-functional robots. In terms of functionality, the robots can inspect a complete set of quality inspection items, excluding the baffle avoidance function and rotor non-destructive inspection function of the multi-functional robots.
These robots enable detailed inspections of the rotors and stators inside the generators in about 12 days*2 (including the period for generator disassembly and assembly), which is about half the time required for conventional precision inspections, without rotor removal. The robots can be applied not only to turbine generators manufactured by Toshiba ESS but also to other manufacturers’ equipment.
Toshiba ESS will utilize these robots to develop its maintenance service business for thermal and nuclear power plants, and the company will strengthen its maintenance service business for existing power plants not only in Japan but also in Europe, North America, Southeast Asia, and other parts of the world, while contributing to maximizing customer profits.
*1: Barrier built into the stator for internal ventilation rectification.
*2: Since different types of generators have different numbers of inspection points, the number of days needed for the inspections may vary.
Robot Overview
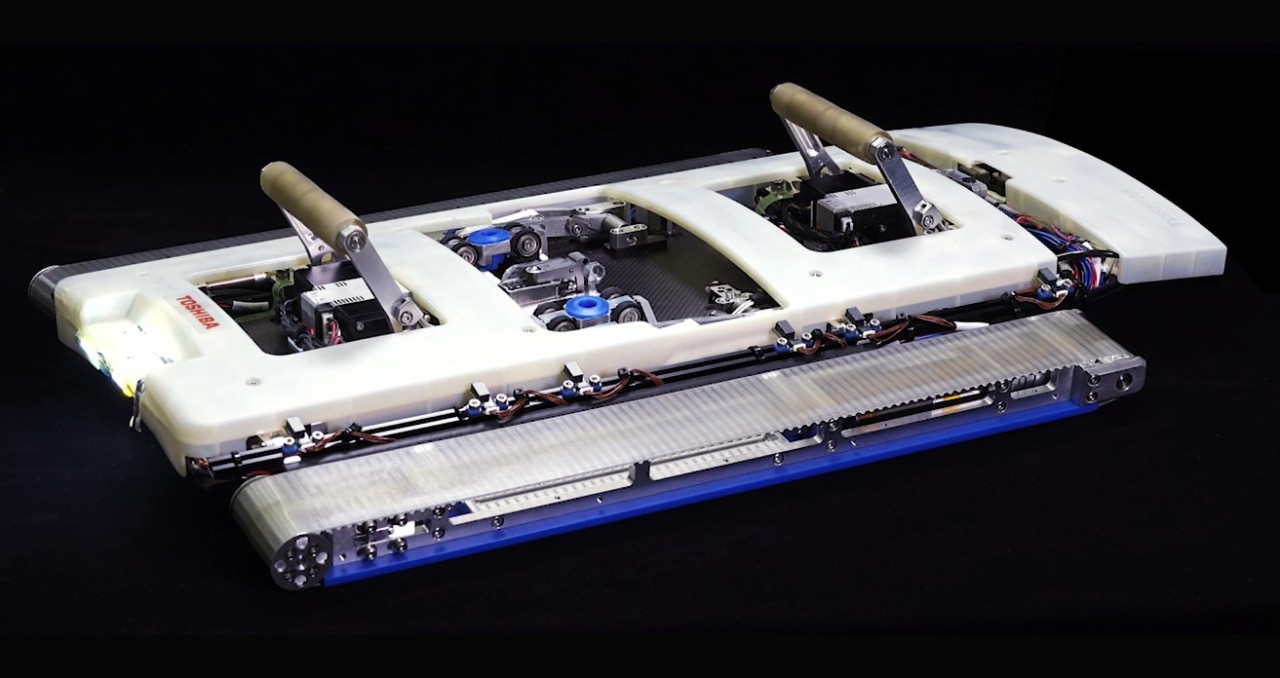
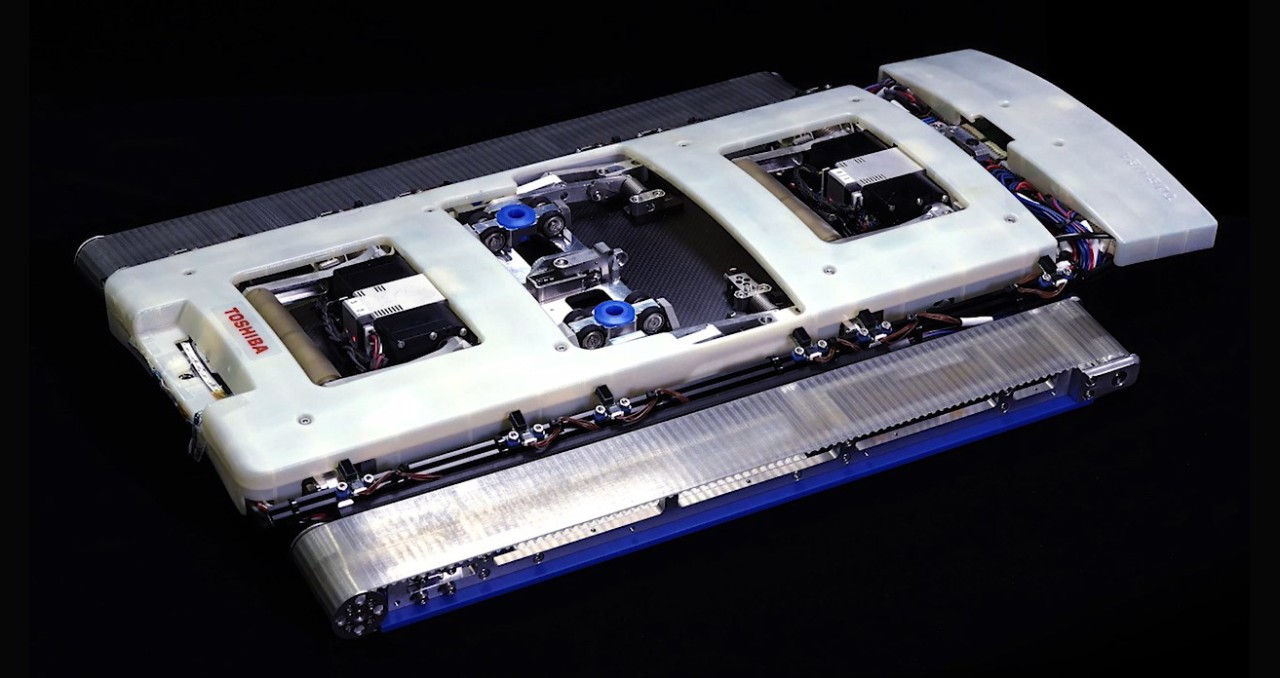
Multi-Functional Robots
Dimensions: 33 mm thick (frame thickness with arms folded)
Length: 700 mm, width: 315 mm
Weight: Approx. 4.7 kg
Running method: The arm holds the robot in a position between the stator core and the rotor while it runs on the rotor. Capable of inspecting large generators with baffles.
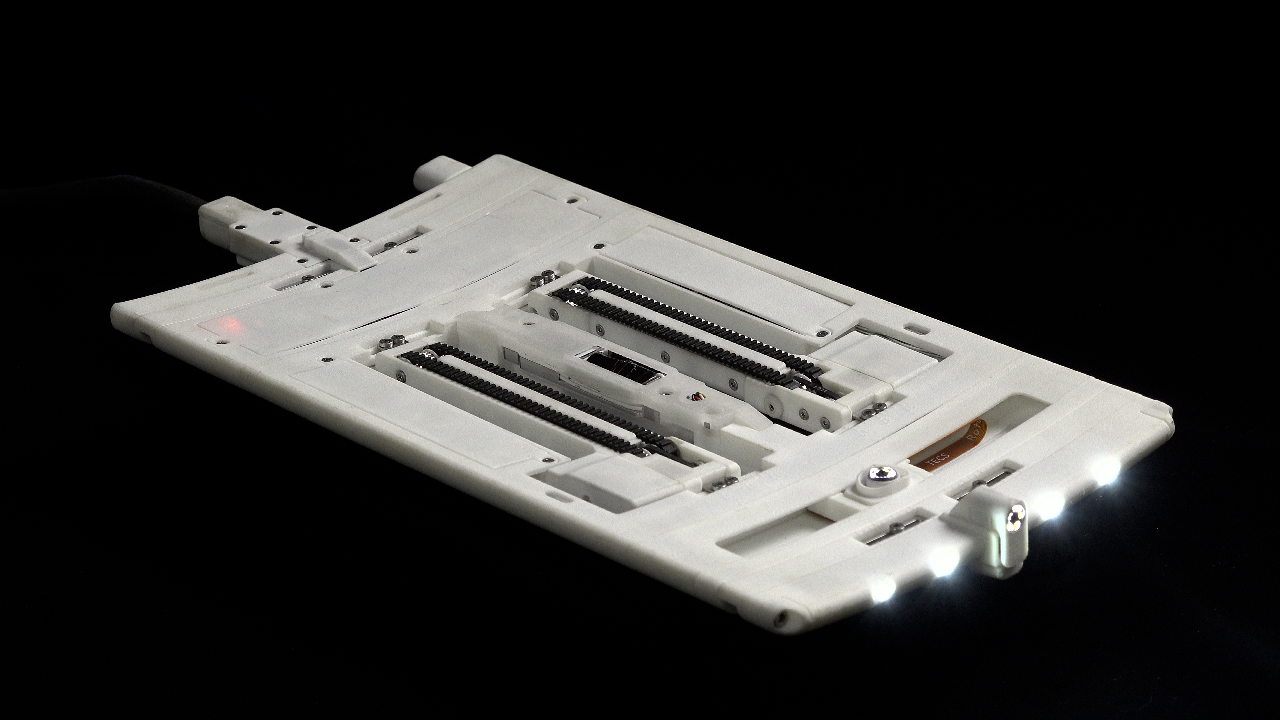
Ultra-Thin Robots
Dimensions: 10 mm thick (frame thickness not including protrusions)
Length: 325 mm, width: 172 mm
Weight: Approx. 0.75 kg
Running method: Runs by magnetic attraction to the surface of the stator core.
About Main Inspection Functions
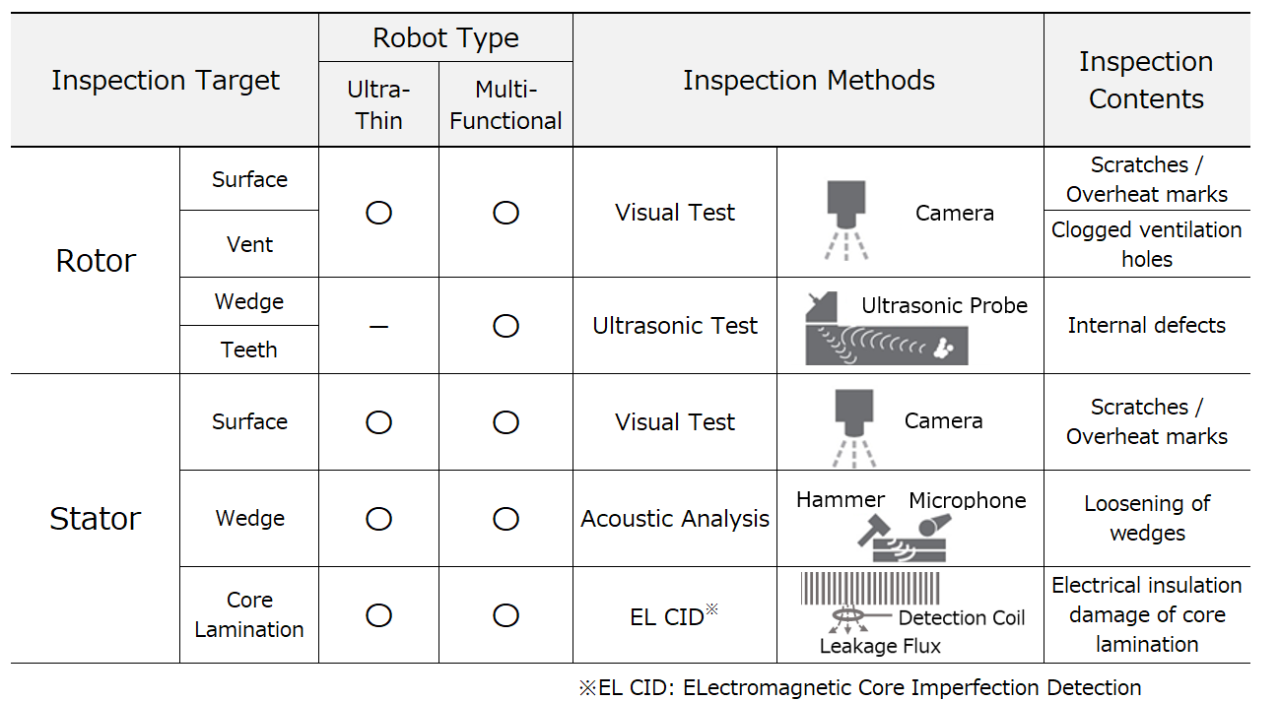
Robot Images and Video
Multi-Functional Robot
Ultra-Thin Robot

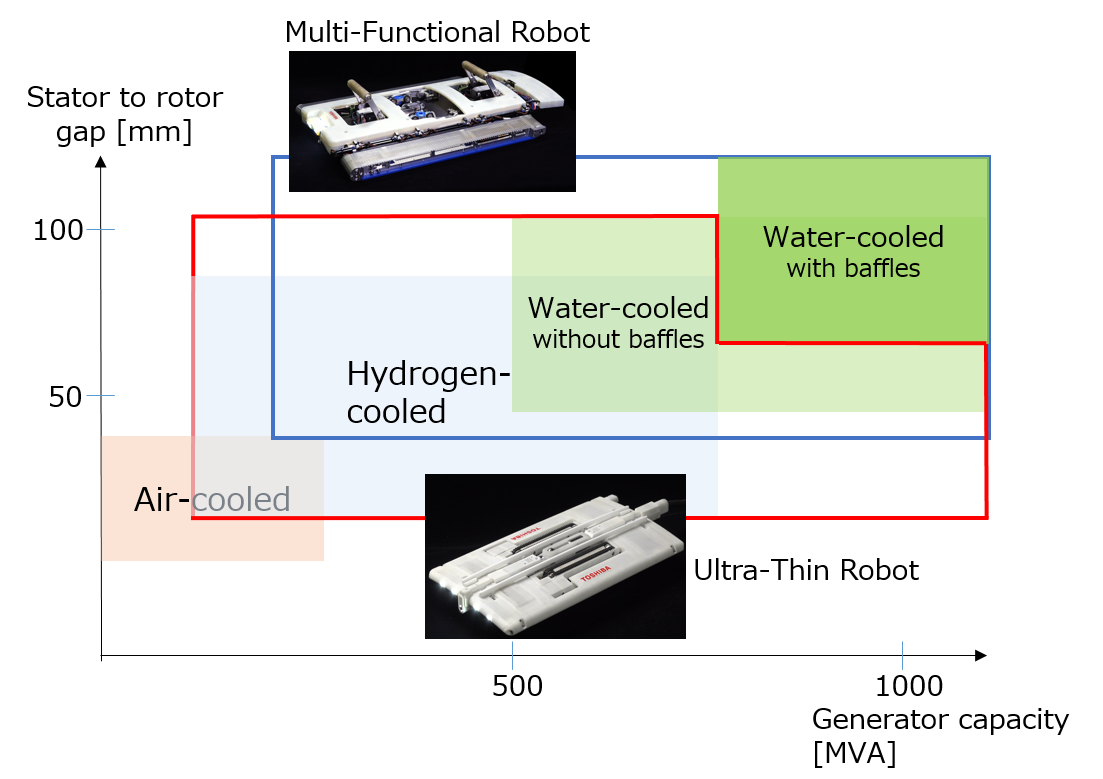
Robot Coverage
Information in the News Release, including product prices and specifications, content of services and contact information, is current on the date of the News Release , but is subject to change without prior notice.
