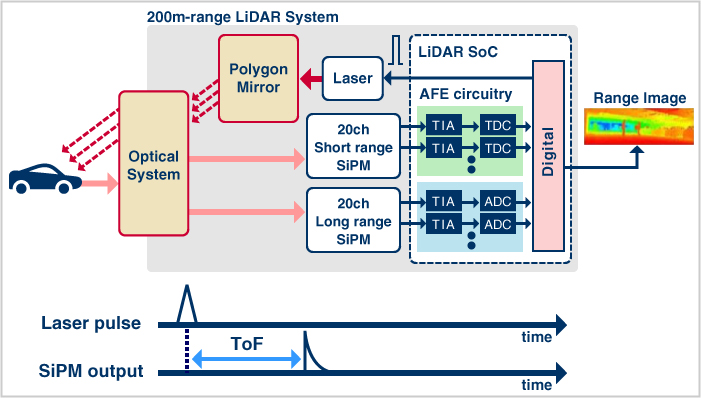
ソリッドステートLiDARの計測IC技術レーザ光源の測距センサで
自動運転をサポートする
IoTエッジ技術開発部門 タ トァン タン
2013年入社 電気工学専攻
LiDARの低コスト・小型化を目指す
デバイスと回路を組み合わせ、評価を繰り返す
ある日のスケジュール
- 9:00
- 出社
- ・メールおよび本日のスケジュールを確認
- 10:00
- 設計または実験/データ整理/社内資料作成
- 12:00
- 体育館で30分程度バドミントンをプレイしてから昼食
- 13:00
- 設計または実験/データ整理/社内資料作成
- 15:00
- 事業部とのミーティング(火曜のみ)
- 19:00
- 退社
この技術を自動車に乗せるために、研究開発を進める