
Products and engineering services
Efforts toward restoration of Fukushima site











The government and Tokyo Electric Power Company Holdings, Inc. have developed a mid-and-long-term roadmap towards the decommissioning of TEPCO's Fukushima Daiichi Nuclear Power Station*1 in 30 to 40 years. This roadmap has set the target for the areas of management of contaminated water, removal of fuel from spent fuel pools, retrieval of fuel debris, and management of radioactive waste.
We have been making continuous efforts to develop the technologies to solve the challenges for achieving these targets and providing support toward decommissioning.
*1: Mid-and-long-term roadmap towards the decommissioning of TEPCO's Fukushima Daiichi Nuclear Power Station by Tokyo Electric Power Company Holdings, Inc.
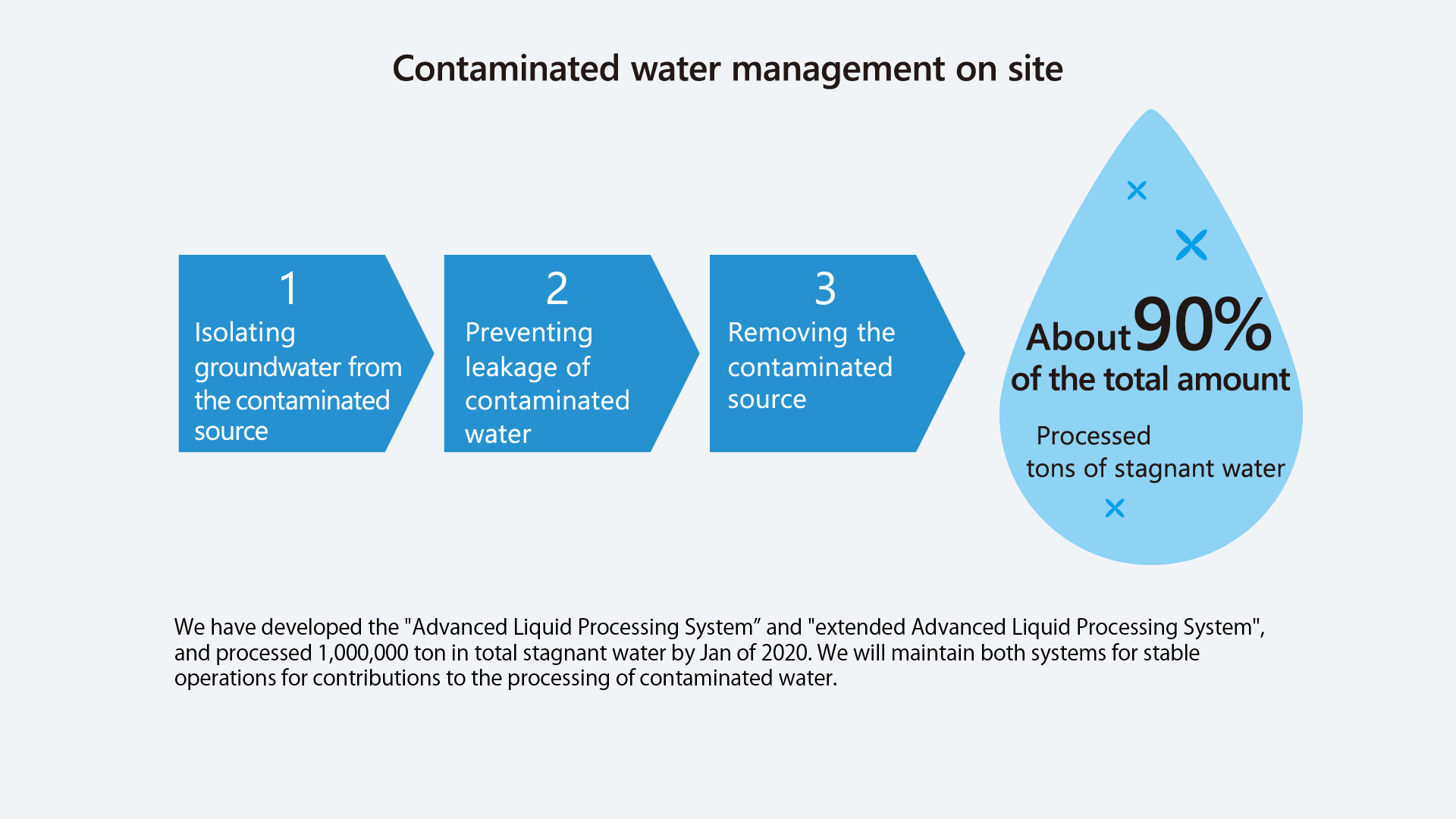
Contaminated water management on site
SARRY™, removing cesium and strontium
We collaborated with partner companies in the U.S. and Japan to develop equipment to remove cesium from the contaminated water. The operation of the equipment started in August of 2011. Since then, we have added the strontium removal function. The equipment has been stably operating and contributing to the processing of contaminated water.
*SARRY™: Simplified Active Water Retrieve and Recovery System

Advanced Liquid Processing System(ALPS), removing 62 types of radioactive nuclides
We have developed Multiple Radio-nuclides Removal System (MRRS™, called ALPS) to remove 62 radioactive nuclides, except cesium, from the contaminated water to a harmless concentration level. The system was launched in March of 2013. We have also developed an extended ALPS. They are in stable operation and making contributions to the processing of contaminated water.
Large-capacity welded tank to store processed water
We proposed the installation of welded tanks with less leakage risks to Tokyo Electric Power Company Holdings, Inc. By installing multiple tanks, not only manufactured in-factory, but also welded on site as scheduled. We have been contributing to the stable processing of contaminated water.

Debris and fuel removal from the spent fuel pool and decontamination
Debris removal from unit 3, by consideration with 3D CAD models
Large debris was scattered in the spent fuel pool of unit 3. In order to seize the large debris and it removes safely using remote operations, we prepared 3D CAD models based on the images taken, work simulations done, and the large debris removal system that we developed. As a result, the debris removal was completed in November of 2015.

Spent Fuel Removal System for unit 3
We have developed a system, to remove fuel assemblies from the spent fuel pool in unit 3. This system consists of fuel-handling equipment, cranes, and peripheral facilities. After storing fuel assemblies in the on-site transport container, this system can transport them to the ground level. Fuel removal work using this system was started in April of 2019, and the removal of all 566 fuel assemblies was completed in February of 2021.
Dry ice blast decontamination equipment to remove contaminants efficiently*2
We have developed a robot to decontaminate the higher working areas on the first level of the nuclear reactor building and started the decontamination work in January of 2016. We have also developed equipment for the lower working areas. This technology can decontaminate contaminated areas without creating secondary wastes by spraying dry ice in contaminated areas and directly inhaling it.

Investigation inside and outside of the containment vessel
Underwater Robot to investigate Primary Containment Vessel of unit 3*2
We have reduced the size and weight from the conventional type. This robot went through an approximately 14 cm diameter penetration pipe and investigated the lower part of the nuclear reactor's containment vessel, which was flooded with the cooling water in July of 2017.
Shape changeable Robot to investigate Primary Containment Vessel unit 2*2
This robot takes video images while raising up its rear section, like the tail of a scorpion, to use as an LED light. It is designed to be self-righting, so there is no concern if it rolls over.
This robot went through an approximately 11 cm diameter penetration hole and searched for any fallen objects and damages in the lower part of the reactor's containment vessel and investigated its condition, etc., in January of 2017.
Pan-tilt Camera to investigate Primary Containment Vessel unit 2*2
The pan-tilt camera which is hanging from the tip of a telescopic pipe extending to about 5m, can shoot 120 degrees along its vertical direction and 360 degrees horizontally by remote control while illuminating the surroundings with the LED light.
We succeeded in taking images of objects with high probability of fuel debris for the first time using this pan-tilt camera that can reach the bottom of the primary containment vessel, in January of 2018.
Device with a finger drive mechanism for touching the deposits in the interior of Primary Containment Vessel unit 2
We remodeled the pan-tilt camera used for investigating in January 2018 and added a finger drive mechanism for touching the deposits to investigate their condition.
We succeeded in touching the deposits for the first time using this device in the bottom of the primary containment vessel, in February 2019.
Demonstration under simulated environment
Quadruped robot to avoid obstacles
We have developed original algorithms for walking over obstacles and controls for climbing up and down steps, as well as the articulated structure to reproduce quadruped walking.
This robot can work in areas where it is difficult to reach for the conventional wheel or crawler-type robots. This robot investigated the condition in the unit 2 reactor building in March of 2013.
Investigation of fuel debris and removal
System to observe the fuel debris condition, using cosmic rays*2
We have developed the equipment to observe the fuel debris positions by utilizing the characteristics of the cosmic ray Muon*, which comes from space, by scattering the heavier elements. This equipment can investigate the condition of the reactor core for the nuclear reactor pressure vessels, with a resolution of approximately 30 cm.
*Muon: A cosmic-ray produced by collisions of high-energy electrons and protons with nitrogen and oxygen in the atmosphere.

Laser gouging technology to process fuel debris*2
This was developed as one of the approaches to retrieve fuel debris. By using water injection and laser irradiation in the same axis, we can scrape off the surface of fuel debris both in air and under water.
*2: Developed under "The Subsidy Project of Decommissioning and Contaminated Water Management" (by IRID)


