
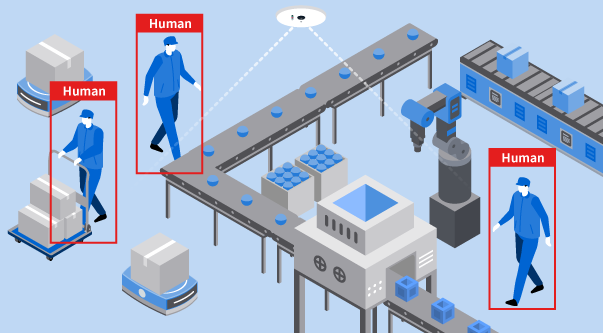

これからの工場や倉庫においては、従来のフォークリフトの他、AGV※1やAMR※2など自律して動き回る機械と作業員が同一エリアに共存して働く機会が増えると考えられます。

例えばカメラなどを用いた動作検知では、物体の移動による映像の変化を利用しています。
作業員以外に動き回る物体が共存する環境下では人以外の動く物を誤認識して、ファシリティのコントロールに悪影響を与えることはないのでしょうか?
※1 AGV(Automatic Guided Vehicle):無人搬送車
※2 AMR(Autonomous Mobile Robot):自律移動ロボット
![[イメージ]第7話 人以外に動くものを誤認識するんじゃないの?](/content/toshiba/jp/products-solutions/building-dx/smart-eye-sensor-multi/solution/episode7/_jcr_content/root/contentsArea/mainarea/container_copy_copy_/layoutcontainer_1779283728/layoutcontainer/image.coreimg.png/1685938426429/7-01.png)
カーボンニュートラルへの貢献を目指して、 ZEBに対応した工場や倉庫を実現するために、よりいっそう省エネ化を図りたい。
![[イメージ]第7話 人以外に動くものを誤認識するんじゃないの?](/content/toshiba/jp/products-solutions/building-dx/smart-eye-sensor-multi/solution/episode7/_jcr_content/root/contentsArea/mainarea/container_copy_copy_/layoutcontainer_1779283728/layoutcontainer_copy/image.coreimg.png/1685938439222/7-02.png)
労働力減少の課題を解決するために、製造や物流の現場にAIやロボットなどの先進技術を積極的に導入したい。
![[イメージ]第7話 人以外に動くものを誤認識するんじゃないの?](/content/toshiba/jp/products-solutions/building-dx/smart-eye-sensor-multi/solution/episode7/_jcr_content/root/contentsArea/mainarea/container_copy_copy_/layoutcontainer_1779283728/layoutcontainer_copy_1146284089/image.coreimg.png/1685938449881/7-03.png)
人とロボットが協働する空間においても、両者を混同することなく、人に合わせたファシリティのコントロールを行いたい。

東芝多機能画像センサ「SMART EYE SENSOR MULTI」にお任せください︕
自動車の先進運転支援システムなど高い認識精度が要求される分野で使用されている画像認識プロセッサを搭載しているので、複雑な人物の形状を学習させることで、画像から人とそれ以外の対象とを見分ける機能を持っています。

作業員とロボットが共存するエリアであっても、人がいる・いないや人数に応じて適正にファシリティをコントロールするのに役立ちます。
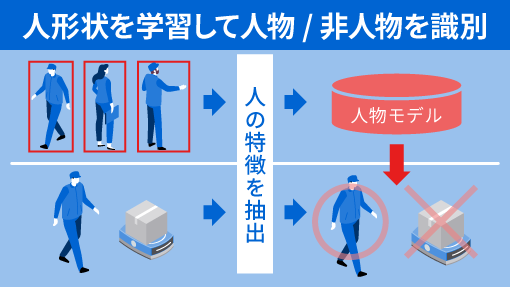
人形状を学習することで人物 / 非人物を識別
SMART EYE SENSOR MULTIに搭載されている東芝製画像認識プロセッサVisconti™は、ディープラーニング(深層学習)の手法を用いる※3ことで、さまざまな対象物を高い精度で認識できるようになります。
多数の人物画像から人の形状の特徴を抽出してモデル化しておき、人がいる画像であれば人物モデルに共通する特徴が多く抽出されるので、人か人以外の物体かを判別できます。
※3 開発中
パターンマッチングにより人物を追跡
人の見え方や輝度の変化、障害物の存在などによって人を見失った場合でも、直前の画像で検出された人物領域の見た目のパターンをマッチングすることによって、現在の画像における人の位置を推定します。
位置や速度、見た目の類似度を評価し、もっとも類似点が多い場合は同一人物だと判定し、2つの移動軌跡を繋げます※4。
これにより、作業員の移動経路を追跡するなど人流分析に活用しやすくなります。

※4 開発中
人とロボットが協働する空間におけるファシリティのコントロール
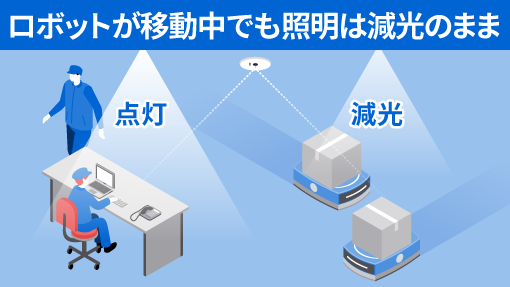
人とロボットが協働するような空間であっても、両者を混同することなく識別することができるので、適正にファシリティをコントロールするのに役立ちます。
例えば、執務室において移動中のAMRや清掃ロボットなどに反応して、よけいな照明の点灯は行いません。
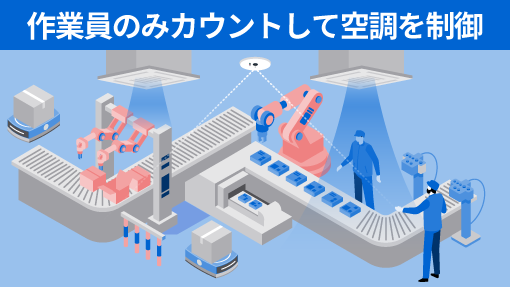
また、工場や倉庫においてAGVは含めず、働く人の人数のみカウントして、空調や換気の風量コントロールを行えます。
学習機能の拡充により広がる可能性
SMART EYE SENSOR MULTIに人物以外のいろいろな物体の形状を学習させることで、ロボットや車両なども識別できるようになります。
将来的には以下のようにセンシング能力の応用が広がる可能性があります。
- 人の存在や密集度に応じたAGVやAMR、配送ロボットなどへの適正ルートの通知
- 荷物や工具などが本来の正しい配置場所から外れていることを検知
- 倉庫の荷崩れを検知
- 転倒や急病などにより作業場で倒れた人を発見し発報
お客さまが抱えているお困りごとや今後チャレンジしてみたいセンシングの構想などございましたら、当社のセンサの力で解決できそうかお気軽にご相談ください。

労働力減少の課題に対応するために、これからの製造や物流の現場には自律ロボットが導入され、人と協働するシーンが増えていくことが見込まれます。
人とロボットが共存する空間においても、省エネしながら働く人の快適性の向上も図る作業環境の構築にお役に立てる、高い認識精度の人感センサを私たちは提供していきます。
次回は、「お手軽に画像を送れます」篇をお届けします。
お楽しみに︕





