
活動事例
開発秘話
当社開発の製品や技術について、そのきっかけや開発過程のエピソードなどを紹介します。
「過酷環境向け4足歩行ロボットの開発」
- 人間に代わって未知の環境で作業するロボットの実現 -
福島第一原子力発電所におけるロボットの遠隔操作
東日本大震災で被災した福島第一原子力発電所では、建屋内に、放射性物質の放出により人が近づくことができない、あるいは長時間滞在できない領域が広範囲にあり、ロボットを遠隔操作して作業を行うことが求められています。東芝はこれまで、原子炉内での定期検査等で用いられる遠隔で作業するロボットを開発してきました。原子炉内も水中で放射線量が高い過酷な環境ですが、それ以上に過酷な環境に対応するロボットの開発が必要となりました。そこで、東芝はプラント内の狭い通路や階段を通過でき、がれきの散乱や足場の損傷など想定が困難な未知の環境を移動して作業できる4足歩行ロボットを開発して現場作業に適用しました。ここでは、このロボットを用いた現場作業の紹介と、その作業を成功させるために行った取り組みについて紹介します。
4足歩行ロボットの概要
災害現場用の移動作業ロボットとしては、移動機構としてクローラ(金属やゴム製のベルトを車輪で駆動する機構)を用いたものがよく利用されています。しかし、プラント内の狭い場所でも前後左右に自在に移動でき、胴体の姿勢を調整して階段やがれきなどの不整地上でも安定してバランスを保つことのできる特徴に着目して、私たちは4足歩行が可能な移動機構を採用しました。開発したロボットの外観を図1に、基本仕様を表1に示します。各脚は人間の股と膝に相当する2つの関節を持ち、がれきなどの不定形な地面に対しても接地できるように足先は球面形状としています。階段のような段差がある場所では常に3本の脚で胴体を支持しながら歩行することで、姿勢を安定させて移動することができ、斜度45度、段差220mmまでの階段を昇降することができます。また、平坦な場所では対角の2本の脚を同時に振り出す歩き方によって最大速度1km/hで移動することができます。ロボットの胴体部には各関節のモータを駆動する電子回路や制御用コンピュータなどの制御ユニット、バッテリ、足元や周囲を監視するためのカメラおよび照明を搭載しており、遠隔地にいるオペレータがカメラ映像を通してロボットの周囲状況を確認しながら無線で操作できるようになっています。また、胴体上部に搭載した作業ツールを取り換えることで、様々な作業を行うことができます。
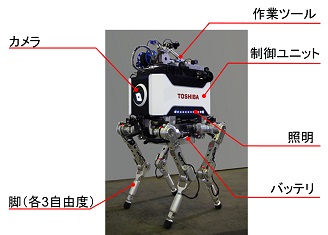
図1 4足歩行ロボットの外観
表1 4足歩行ロボットの主な仕様

ベント管からの冷却水漏えい箇所調査への適用
福島第一原子力発電所の1号機から3号機は、原子炉格納容器(PCV)から漏えいした大量の汚染水が原子炉建屋地下階のトーラス室と呼ばれる領域に滞留しており、その漏えい箇所を特定することが課題となっています。トーラス室内にあるベント管と呼ばれる構造物が漏えいの候補箇所となっていましたが、室内は放射線量が高く人が立ち入ることができないため、開発した4足歩行ロボットを使って漏えいの有無の確認調査を行いました(2号機)。トーラス室には作業員が点検時に通行する歩道(キャットウォーク)がありますが、そこからはベント管を直接監視することができません。そこで、4足歩行ロボットに調査用の小型走行車とそれを吊り下げるための搬送アームを搭載し、ベント管近傍位置まで歩行して移動した後に、小型走行車によって狭隘な場所を通過してベント管の近傍まで移動して調査箇所を撮影する方法を採用しました(図2、図3)。2012年12月に調査作業に着手し、2013年3月に2号機の全8本のベント管の調査を無事完了し、ベント管からの漏えいが無いことを確認して、その後の漏えい対策方針の絞り込みに貢献することができました(1)(2)。
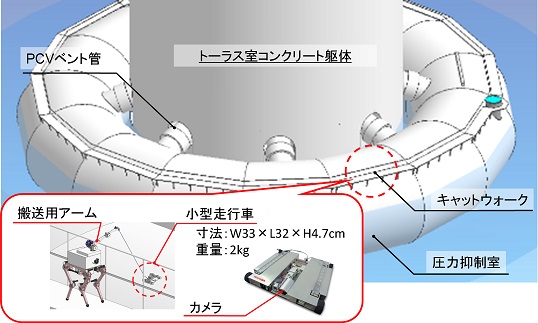
図2 格納容器ベント管調査の概略図
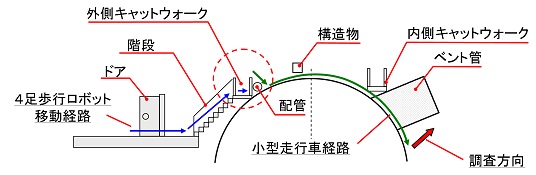
図3 ロボットの移動経路
ロボットによる調査を短期間で実施するための取り組み
前記のベント管調査のようにプラント内を移動して作業するロボットを実現するためには、プラントの構造を正確に把握して装置を設計するとともに、事前に十分な機能検証と操作訓練を行うことが重要になります。特に、福島第一原子力発電所の場合は、がれきの散乱や床面が損傷している可能性があり、図面情報だけから踏破可能かどうか判断することができません。そこで、図4に示すようなトーラス室内構造物の実寸大の部分模擬体を用意し、階段の昇降やキャットウォークの歩行、小型走行車の吊り下げ・移動・回収など、個別の機能検証を行うとともに、一連の調査作業の習熟訓練を繰り返して行いました。また、現場での調査作業で想定されるリスクを抽出して、例えば床面の濡れや堆積した粉塵に対する影響の確認を行い、小型走行車のタイヤの材質の変更や交換頻度を規定するなど、装置改良や運用方法の改善で対策を施しました。これらの知見をもとに詳細な操作手順書を作成してオペレータと手順確認者が相互確認しながら作業を進めるなどヒューマンエラーの防止にも努めました。更に、実際の調査の前には2号機と類似した構造の5号機を利用して最終確認試験を行ってから本番に臨みました。一度現場で利用したロボットは放射性物質が付着して汚染してしまうため、不具合が発生しても実験室に持ち帰って再検証することができません。そこで、同じロボットをもう1台用意し、現場で発生した不具合に対しては実験室のロボットで検証して制御プログラムを改良できるようにするなどのバックアップ対策を用意しました。実際に、現場で発生した階段歩行時の転倒事象や、小型走行車のケーブル巻取装置の動作不良などの不具合を解決する際に役立ち、全調査をやり遂げることができました。
この4足歩行ロボットは、事故以降の福島第一原子力発電所への適用を想定して2011年秋から開発に着手しましたが、ここで紹介したような装置の開発だけでなく運用面での準備を十分に行うことで、約1年という短期間で現場作業に適用して調査を成功させることができました。
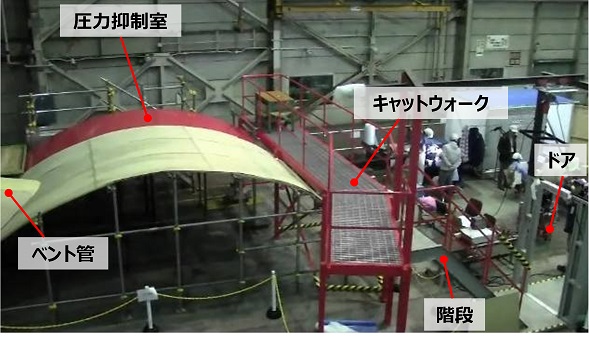
図4 トーラス室内構造物の部分模擬体
今後の展開
ベント管調査では4足歩行ロボットが小型走行車を運搬して作業を行いました。今後実施予定の調査や工事作業では様々な機材や資材を運搬することが想定されるため、専用の搬送アームを搭載するのではなく、ロボット自身の脚機構を利用して荷下ろしと荷積みを行える機能を開発しました(図5)(3)。また、より重いもの、長いものを運搬できるように、2台の4足歩行ロボットを協調動作させて運搬できるようにしました(図6)(4)。今後も、廃炉に向けて作業員に代わり様々な作業をロボットで行えるようにして、作業員の被ばく低減に貢献していきます。
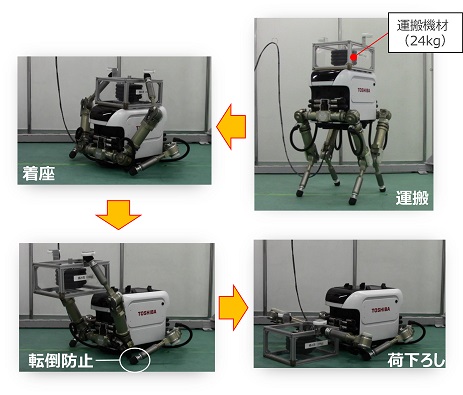
図5 脚を用いた荷下ろし動作
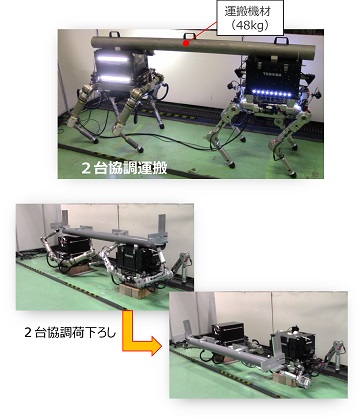
図6 2台のロボットによる協調運搬
参考文献
(1) 東京電力ホールディングス. “福島第一原子力発電所2号機ベント管下部周辺調査結果について”. 東京電力. (https://photo.tepco.co.jp/date/2013/201303-j/130315-03j.html)
(2) 菅沼直孝 他. 原子炉建屋内の運搬作業を担う4足歩行ロボットの制御技. 東芝レビュー. 69, 10, 2014, p.48-51.
(3) Matsuzaki, K. et al. “Quadruped Robot for Improving Workability at Hazardous Environment: Development of Load Carriage Function”. Proceedings of the 23rd International Conference on Nuclear Engineering (ICONE23). Chiba, 2015-05, JSME, ASME and CNS. Tokyo, JSME, 2015, ICONE23-1232.
(4) 上田紘司 他. 放射線環境下での作業員の被ばく低減に向けた4足歩行ロボット2台の協調動作による荷物運搬技術. 東芝レビュー. 70, 12, 2015, p.36-39.