
NEDOが委託する「ポスト5G情報通信システム基盤強化研究開発事業」(以下、本事業)の一環で、株式会社東芝と東芝インフラシステムズ株式会社は、世界初となる電波マップに基づきロボットの移動経路を制御する技術を開発し、ローカル5Gを活用したサーバー集約型技術で移動ロボット群のリアルタイム制御に成功しました。
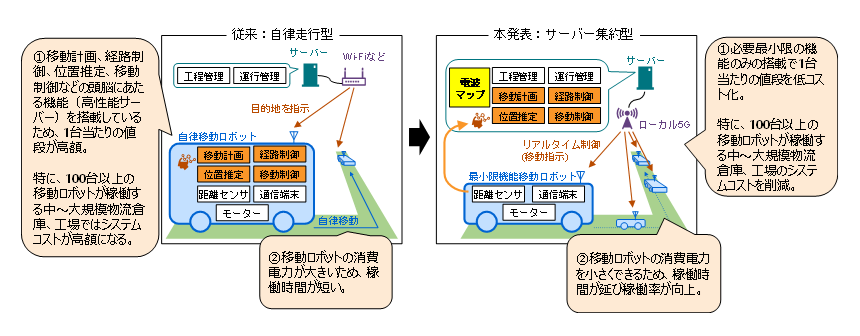
ロボットの「頭脳」にあたる機能はサーバー側に集約し、ロボット本体は「運ぶ」機能に絞ることで、ロボット1台当たりのコストと消費電力の低減を図りました。サーバー集約型は、電波の遅延や遮断でロボットが停止する問題がありましたが、低遅延特性・低ゆらぎ特性を持つローカル5Gを活用し、ロボット群からの情報で常に最新の状態に更新される電波マップに基づいた動的経路制御機能を搭載することで解決しました。これにより、中・大規模の物流倉庫や工場などの自動搬送システムの導入コストを約10%低減するとともに、ロボットの消費電力が約14%低減され稼働率が約16%向上する見込みです。
さらに、複数の同種類・同サイズのロボットが協調して一つの荷物を挟みこみ搬送する協調搬送技術も開発しました。搬送する荷物の大きさ・重さに応じて、異なる種類・サイズのロボットを導入する必要がなく、自動搬送システムの導入コストをさらに低減できます。
今後、東芝と東芝インフラシステムズは2025年の事業化を目指して、物流倉庫や工場などでの実証を進め、物流の効率化と労働力不足の解決に貢献します。
1. 背景
EC市場の活性化による物流量の大幅増加やサプライチェーンの強靭化(きょうじんか)に対するニーズが高まる一方で、国内においては、人口減少に伴う労働力の低下に加え、2024年4月から適用されるドライバーの時間外労働の上限規制による輸送能力不足への懸念、いわゆる「2024年問題」が喫緊の課題となっています。こうした課題に対応するため、物流倉庫や工場などでは、自動搬送システムの導入などによる物流の効率化が進められています(*1)。
現在の自律走行型ロボットを用いた自動搬送システムは、通信の遅延やゆらぎによるロボットの制御ミスを防ぐため、移動計画や位置推定、経路制御、移動制御などのロボットの「頭脳」にあたる機能については通信に頼らず、ロボット本体に搭載しています。そのため、ロボットは高機能となり、1台当たりの設置価格や消費電力が高く、中・大規模の物流倉庫や工場などで複数台のロボットを導入する場合、コストが高くなることが問題となっています(図1(左))。また、ロボットの消費電力の増加は充電頻度の増加につながり、稼働率の低下に直結します。さらに、搬送する荷物の大きさや重さに対応した異なる種類・サイズのロボットが必要となることも、コストが高くなる原因となっています。
こうした背景を踏まえ、NEDOが委託する本事業(*2)の一環で、東芝と東芝インフラシステムズは、ポスト5G(*3)時代の自動搬送システムにおける移動ロボット制御技術の研究開発に取り組みました。
2. 今回の成果
(1)ローカル5Gを活用したサーバー集約型技術でロボットの移動経路を制御することに成功
ロボット本体には必要最小限の「運ぶ」機能のみを搭載し、ロボットの「頭脳」にあたる機能をサーバーで集約制御するシステムを開発し、12台のロボット群のリアルタイム制御に成功しました。サーバー集約型技術においては、電波の遅延や干渉で制御信号がロボットまで到達せず、ロボットが停止する問題がありましたが、低遅延特性・低ゆらぎ特性を持つローカル5G(*4)を活用することで解決しました。
これにより、ロボット1台当たりの低コスト化と消費電力の低減を実現できます。また、充電頻度の抑制による稼働率向上も見込めます。
(2)世界初となる電波マップに基づく動的経路制御技術を開発
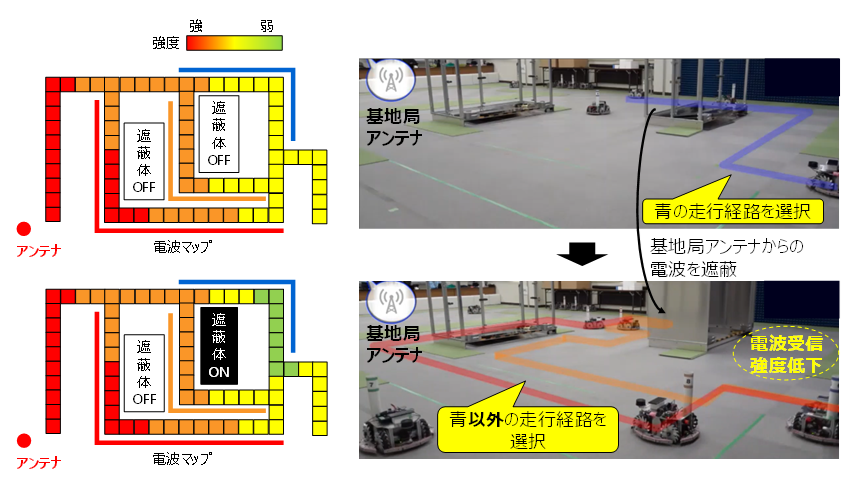
上記(1)と併せて、世界初(*5)となる電波マップに基づきロボットの移動経路を制御する技術を開発しました。物流倉庫や工場などでは荷物の搬入出で、絶えず物理的環境が変化し、障害物の有無によって電波環境が変動します。そこで東芝と東芝インフラシステムズは、ロボットが移動中にモニタリングしたローカル5Gの電波状況をサーバー側でマップにする方法を考案し、電波状況の強弱に応じてロボットの走行経路を動的に制御する技術を開発しました。ロボットが走行経路上の電波受信強度を逐次モニタリングして、ロボット本体に搭載されている通信端末からサーバーに送信することで、サーバーが走行経路上の電波状況を電波マップとして生成します。電波マップは、ロボット群からの電波受信強度情報で逐次アップデートされ、常に最新の状態に保たれます。サーバーは電波マップの変化から走行経路上の電波受信強度を予測し、ロボットの経路を選択します。これにより、ロボット群は常時、受信強度が十分にある経路を停止することなく走行できます(図2、動画1)。電波マップは、ロボット本体に搭載されている既存の通信端末機能(電波受信強度取得機能)を活用するため、新たな設備を追加することなく生成できます。
(3)自動搬送システムの導入コストを約10%低減、ロボットの稼働率を約16%向上
本事業では12台のロボット群で実証しましたが、ロボットの台数に合わせた拡張性のあるシステム構成により、100台以上のロボットが稼働する中・大規模の物流倉庫や工場などへの適用が可能です。今般開発・実証したサーバー集約型の自動搬送システムを導入することで、中・大規模の物流倉庫や工場などにおいて、自動搬送システムの導入コストを約10%低減するとともに、ロボット本体の機能を絞ることで消費電力を約14%低減し、稼働率を約16%向上させることが見込めます(割合はロボット100台を想定)。
動画1: 今回開発した電波マップに基づくロボットの動的経路制御の様子
※再生ボタンをクリックすると、YouTubeに掲載している動画が再生されます。
※YouTubeは弊社とは別企業のサービスであり、各サービスの利用規約に則りご利用ください。
(4)複数のロボットでより大きな荷物を搬送できるサーバー集約型協調搬送技術を開発
搬送する荷物の大きさ・重さに対応した異なる種類・サイズのロボットを導入することは高コストにつながります。東芝では、これまでにロボット間の直接通信により、一つの搬送対象を複数台のロボットで運搬する協調搬送技術を開発(*6)しています。今回、この技術を応用し、ローカル5Gを活用したサーバー集約型で実現しました(動画2)。これにより、荷物の大きさ・重さによらず、複数台の単一種類・サイズのロボットで搬送が可能となり、自動搬送システムの導入コストをさらに低減できます。
動画2: 2台のロボットによる1台のカゴ台車の協調搬送の様子
※再生ボタンをクリックすると、YouTubeに掲載している動画が再生されます。
※YouTubeは弊社とは別企業のサービスであり、各サービスの利用規約に則りご利用ください。
3. 今後の予定
今後、東芝と東芝インフラシステムズは2025年の事業化を目指して、物流倉庫や工場などでの実証を進め、物流の効率化と労働力不足の解決に貢献します。
NEDOは、本技術をはじめ、今後もポスト5Gに対応した情報通信システムの中核となる技術を開発することで、日本のポスト5G情報通信システムの開発および製造基盤の強化を目指します。
*1 自動搬送システムの導入などによる物流の効率化が進められています
(参考)株式会社矢野経済研究所リリース(2023年1月31日)「物流ロボティクス市場に関する調査を実施(2022年)」
https://www.yano.co.jp/press-release/show/press_id/3184
*2 本事業
事業名:ポスト5G情報通信システム基盤強化研究開発事業/先導研究(委託)/リアルタイムクラウドロボティクス技術の研究開発
事業期間:2020年度~2023年度
事業概要:https://www.nedo.go.jp/activities/ZZJP_100172.html
*3 ポスト5G
第5世代移動通信システム(5G)に対して超低遅延や多数同時接続の機能が強化された5Gです。
*4 ローカル5G
携帯電話事業者による全国向け5Gサービスとは別に、地域の企業や自治体などのさまざまな主体が自らの建物や敷地内でスポット的に柔軟にネットワークを構築し利用可能とする新しい仕組みです。
*5 世界初
ロボット群により常に最新の状態にアップデートされた電波マップの予測に基づいた動的経路制御の開発は世界で初めてとなります。(2023年11月30日時点 東芝調査)
*6 ロボット間の直接通信により一つの搬送対象を複数台のロボットで運搬する協調搬送技術を開発
(参考)東芝プレスリリース(2021年9月17日)「移動ロボット同士の相互回避や協調搬送を実現する協調連携システムを開発」
https://www.global.toshiba/jp/technology/corporate/rdc/rd/topics/21/2109-03.html