
概要
当社は、複数の自律型移動ロボット(以下、移動ロボット)を直接通信でつなげることにより迅速な相互回避や協調搬送を可能にする協調連携システムを開発しました。清掃・警備・搬送など用途が異なる移動ロボットは、通常、異なる運行システム上で動いており、ロボット同士が位置や走行方向の情報の共有ができず、通路上で複数台が立ち往生してしまうといった状況が発生してしまいます。本システムは、移動ロボット同士が互いの情報を迅速に共有することで通路内での相互回避を実現し、運行システムの異なるロボットの導入促進に貢献します。また、直接通信により低遅延通信が可能となるため、複数の同種の小型移動ロボットによる、大きな荷物の協調搬送も可能となります。
当社は、今回、深川江戸資料館で実施した芝浦工業大学のロボット連携実験の一つの実証実験として、異なるロボットとの相互回避の連携実証を行いました。
当社は本技術の詳細を9月14日から17日にかけて開催される2021年電子情報通信学会ソサイエティ大会にて発表します。
開発の背景
昨今のコロナ禍における自動化の需要増加に伴い、移動ロボットは、製造・物流現場での搬送に加え、公共施設内の清掃・警備・搬送など、様々な用途での活用が進んでいます。移動ロボットの市場規模は、国内では2023年 に561億円、海外では2025年に7.36億ドル、年平均成長率はそれぞれ23.7%、15.9%と見込まれています(*1)。
製造・物流現場における搬送では、同一メーカーの同一機種の移動ロボットを複数台用い、全体の運行を上位システムにより管理する形態が一般的です。
一方、公共施設内では、清掃・警備・搬送など、用途ごとに異なるメーカーの移動ロボットが採用されるケースが多くなります。現状は、メーカーごとに独自の運行システムを構築しているため、メーカーが異なるロボット同士では位置情報などの共有ができず、通路上で立ち往生したり、複数のロボットが狭いエリアに進入して動けなくなるといった状況が発生してしまいます。
当社は、国立研究開発法人新エネルギー・産業技術総合開発機構(以下、NEDO)とともに、メーカーや種類が異なる複数の移動ロボットの運用を共通の運行システムで可能とする移動ロボットインターフェースを策定し、サンプルソフトウェアを公開するなど(*2)、ロボット革命・産業IoTイニシアティブ協議会(以下、RRI)のロボットイノベーションWGなどの活動を通じて、本インターフェースの標準化を進めています。
しかし、共通の運行システムを介して移動ロボットの位置情報の共有が可能となっても、通信は遅延・中断する可能性があります。人間同士であれば、声掛けやアイコンタクト、自動車の方向指示器を用いた進路の譲り合いなど、臨機応変に対応します。移動ロボット同士においても、運行システムを介さず互いを認識し、臨機応変に連携する技術が求められています。
本技術の特徴
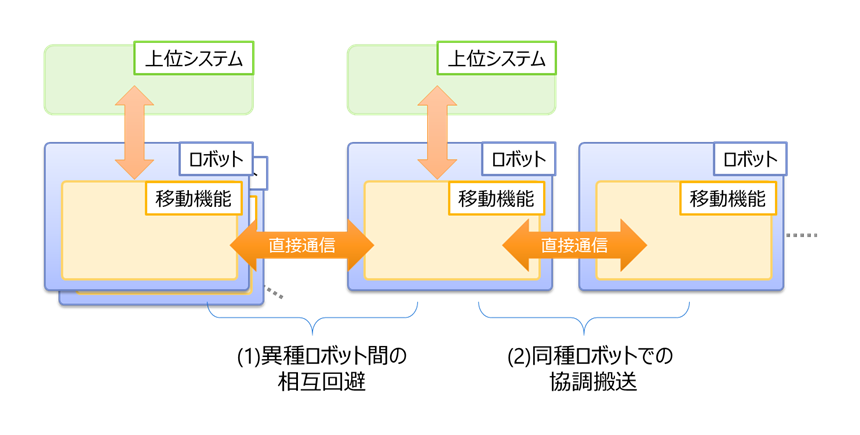
そこで当社は、運行システムを介さず、移動ロボット間で直接通信するプロトコルを定め、ロボット間の通信経路を切替えることで直接通信をより低遅延で実現する無線LANマルチホップ方式(*3)で実装し、移動ロボット同士が直接リアルタイムで情報を交換することを可能にしました。当社は、本技術を用いて、以下の移動ロボット同士の協調連携を実証しました。
1.運行システムが異なる移動ロボット同士の相互回避
現状の移動ロボットは、停止している障害物であれば、回避する軌道を生成し回避することができますが、互いに走行中の移動ロボットは、進行方向が分からず回避が難しくなります。そこで双方の位置と進行方向を共有することで滑らかなすれ違いができることを確認しました。上位の運行システムが異なるロボット同士であっても相互回避が可能です。
なお、本実証は、深川江戸資料館で実施した芝浦工業大学のロボット連携実験の一つの実証実験として行いました。
2.複数の同種ロボットでの協調搬送
1つの搬送物を複数台の同種の移動ロボットがタイミングを合わせながら運搬できることを確認しました。必要に応じてロボットを追加することで、様々なサイズ・重量の積載物に対応することが可能となります。安定した低遅延(10ms以内)の直接通信により、協調搬送を実現しました。
今後の展望
現在RRIにおいては、ロボットのソフトウェアアーキテクチャについて議論され、その仕様策定が進められています。当社は、引き続き、移動ロボット仕様の標準化を図るとともに、RRIの活動などを通じて国際標準化も目指し、様々な場面や用途での移動ロボットの導入促進に貢献してまいります。
なお、本成果の一部は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の助成事業「自動走行ロボットを活用した新たな配送サービス実現に向けた技術開発事業』」(JPNP20018)及び芝浦工業大学工学部機械機能工学科松日楽研究室との共同研究の結果、得られたものです。

*1 国内は、2019年5月 IDC JAPAN社調査。海外は、2019年9月 QYResearch社調査
*2 NEDO・東芝プレスリリース(2019年3月)https://www.global.toshiba/jp/technology/corporate/rdc/rd/topics/20/2003-01.html
*3 中継機能を備えた無線機により情報が多段中継され伝送される技術