
概要
当社は、自動運転や社会インフラ監視に不可欠な「目」の役割を担う距離センシング技術「LiDAR」 (*1) (注1)において、「ソリッドステート式LiDAR」向けに、最長測定距離200mを保ったまま、世界最小のサイズと世界最高の解像度を実現する受光技術(*2)および実装技術を開発しました。本技術の採用により当社従来比(*3)で1/3のサイズとなる約350cc、および、4倍の解像度となる1200×80画素を実現しました。さらに独自のデバイス温度補正技術を組み合わせることにより、振動・風圧・気温変化などが厳しい環境においても高い性能を維持できることを確認しました。集中豪雨時の斜面崩壊や道路等への土砂流入、突風による道路等への落下物、大雪による積雪等の迅速な検知など、屋外への常時設置が必要となるインフラ監視への適用も可能となります。
開発の背景
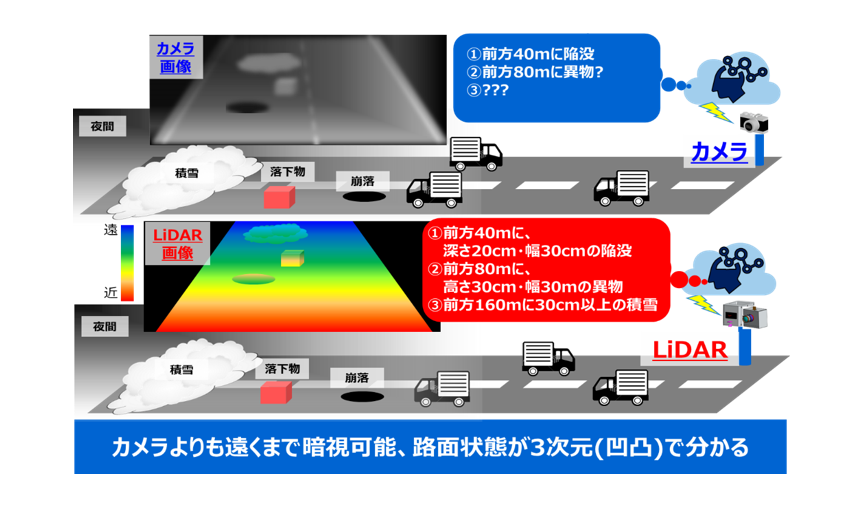
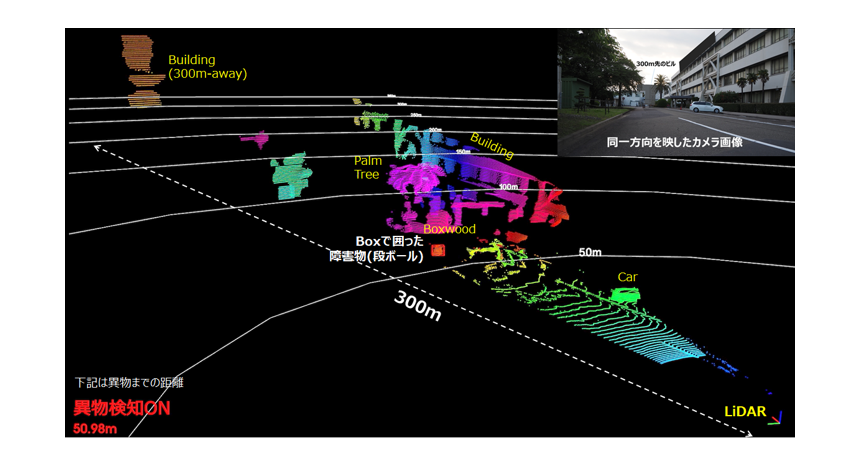
LiDARは、レーザ光を物体に反射させ、戻ってくるまでの時間を計測して距離を測る技術です。物体までの距離を直接測るため、周辺環境の立体構造を瞬時に高精度に観測することができ、自動運転システムにおける活用のみならず、高精度なインフラ監視を実現する技術としても期待が寄せられています。例えば、LiDARを用いることで、道路や建物内等様々な場所における落下物を監視することができ、災害発生時等における迅速な状況把握や通行可否の判断につなげることができます。LiDARはレーザ光を用いることから、一般的なカメラと異なり、暗闇、霧、雪など視界不良の状況にも強く、長距離の監視が可能です(図1)。LiDARの市場規模は急速に拡大しており、2030年には車載用のみで4,200万台/年の市場規模が予想されています(*4)。
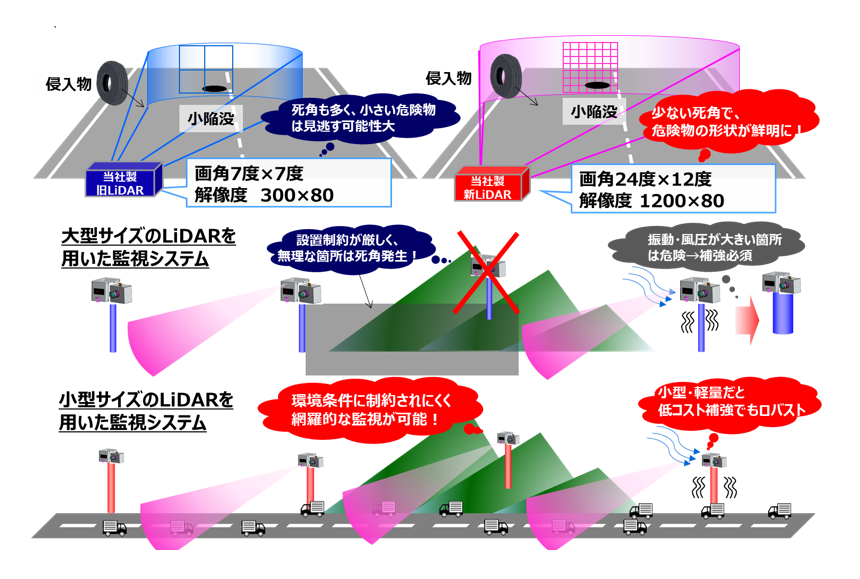
当社は、2020年7月、従来の機械式LiDARと比べて小型化・低コスト化が期待できるソリッドステート式LiDARにおいて、課題とされていた長距離測定・高解像度の両立を可能にする2次元受光デバイスSiPM(*4)を開発しました。しかし、高度な自動運転と高精度な社会インフラの監視を実現するには、画角・解像度・サイズにおいて、さらなる進化が必要です。広画角・高解像度なLiDARは、死角が少なく小さな危険物まで検知することができます(図2上)。また、インフラ監視への適用時は振動や風圧の影響が大きい場所や、急斜面の近くなど厳しい環境下の常時設置・稼働が必要となるため、耐震・耐風補強等が容易な小型・軽量化が求められます。加えて、温度変化が大きい環境下でも性能が低下しないことも重要となります(図2下)。
本技術の特徴
そこで当社は、ソリッドステート式LiDARの性能のさらなる向上に向け、受光デバイスSiPMの感度の向上と小型化の両立を実現する受光技術を開発しました。
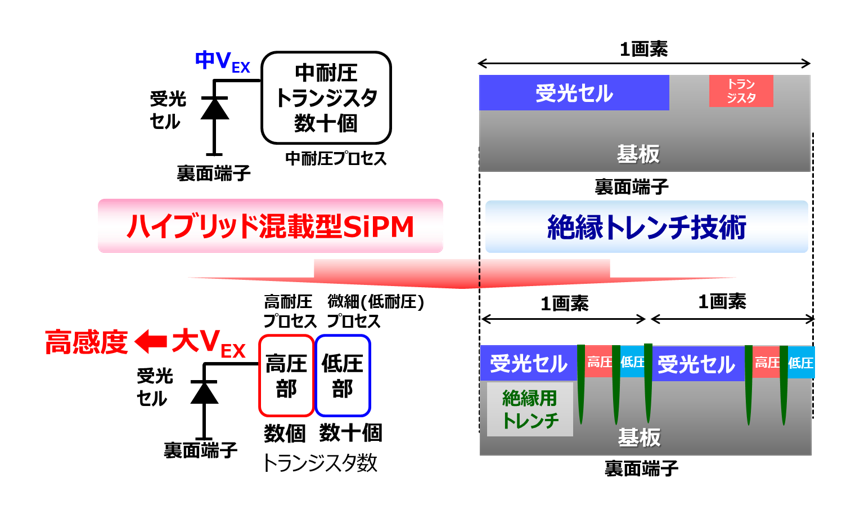
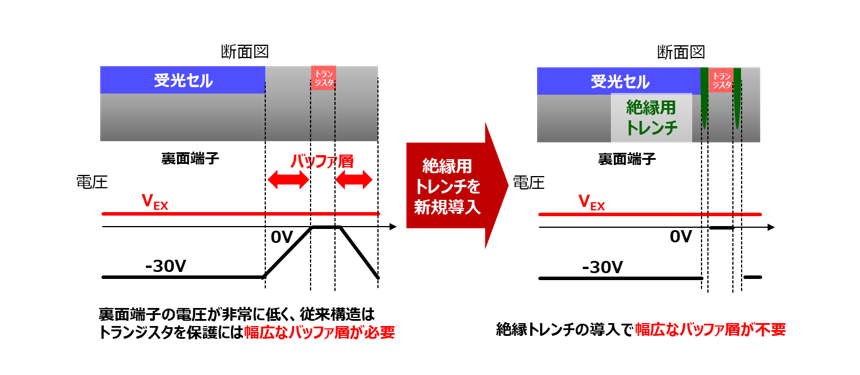
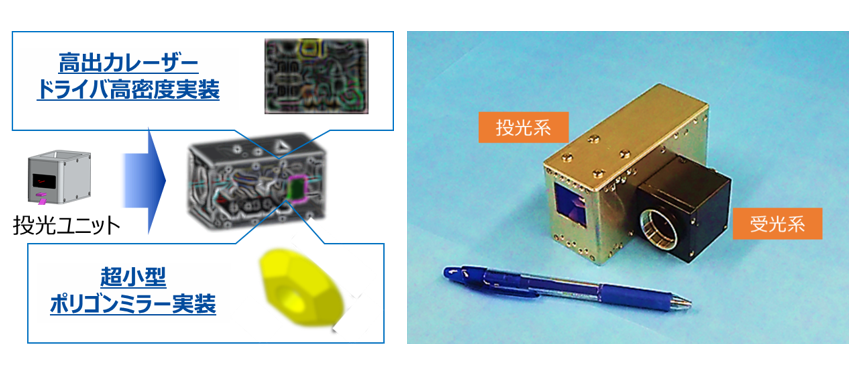
SiPMは、受光セルとその受光セルを制御する複数のトランジスタ回路から構成されます。搭載するトランジスタ回路のうち、コア部分を微細化したトランジスタ回路に変更することで小型化しました。また、受光セルとコア回路の間に高耐圧トランジスタによる高耐圧部を設け、SiPMの感度向上に重要な受光セルへ高電圧(VEX)を供給することで、受光デバイスSiPMの感度の向上と小型化の両立に成功しました(図3)。さらに、新たに開発した絶縁トレンチをトランジスタと受光セルの境界面に挟むことで、これまでトランジスタの保護に必要だった幅の広いバッファ層が不要となり、さらなる小型化を実現しました(図4)。新規開発したSiPMは、昨年開発時から、サイズを1/4に縮小しつつ、感度を1.5倍に高められます。当社は、本SiPMを採用し、さらに、長年培った基板設計とモジュール実装の技術でLiDARモジュールの高密度実装を実現し、従来に比べ、LiDARの解像度を4倍に高めるとともに、LiDAR全体の容積を世界最小の350cc以下に抑えることに成功しました(図5)。
また、SiPMの温度にあわせて受光セルに供給する電圧を適切に調整する自動温度補正技術により、外部の温度変化よらず高い性能を維持することが可能です。振動・風圧にさらされるLiDARを小型・軽量化することで、LiDARの設置条件を緩和し、アプリケーションの拡大に貢献します。
今後の展望
当社は今後も、LiDARの更なる高性能化(長距離測距性能、高解像度、小型化)を進め、高度な自動運転と高精度なインフラ監視の実現を目指します。また、ロボティクス・ドローンやセキュリティ等の他分野にも横展開できるよう、ソリッドステートLiDARの開発を進め、より安心・安全な社会の構築に貢献します。
*1 Light Detection and Ranging:レーザの照射により、離れた物体までの距離情報を3D画像として得る 技術
*2 当社調べ。当社は受光側をソリッドステート化可能な技術を開発。投光側は別途、走査範囲の広いMEMSミラーの開発が必要。
*3 https://www.global.toshiba/jp/technology/corporate/rdc/rd/topics/20/2007-01.html
*4 LiDAR for Automotive and Industrial Applications 2019 report. Yole Development, March 2019
*5 SiPM (Silicon Photo Multiplier): 1光子を受けると、100万電子に変換する高感度光検出デバイス。
サイズは~100µm角
*6 50mの位置においた障害物(段ボール)を検知してBoxで囲っている
条件:日中屋外晴天@低速フレームレート(1fps)
画角、距離:固定、~300m
*7 3つの障害物(段ボール、台車)を検知してBoxで囲っている。光学カメラ映像(左下)では検知困難。
条件:夜間屋外@低速フレームレート(1fps)
画角,距離:固定、~200m
*8 距離20mの車から300m先のビルまでLiDARの向き(画角)を動かしている
条件:日中屋外晴天@高速フレームレート(20fps)
画角、距離:動的、近傍(20m)から遠方(300m)