
情報通信プラットフォーム
レベル4以上の高度自動運転の実現に貢献するLiDAR向け受光技術を開発
-小型化・低コスト化を実現するソリッドステート式において、従来の機械式と同レベルの200mの長距離測定を達成、柔軟なシステム構成で多様な車種への対応も容易に-
2020年07月07日
株式会社東芝
当社は、自動運転に不可欠な「目」の役割を担う距離センシング技術「LiDAR」(注1)において、「ソリッドステート式LiDAR」向けに、長距離測定と高解像度を実現する受光技術を開発しました。
LiDARは、レーザと検出器を回転させることで観測する「機械式」が主流でしたが小型化・軽量化が難しくコストも高いといった課題があり、現在は、半導体技術や光学技術で機構部を置き換える「ソリッドステート式」が増加しています。機械式と比較してソリッドステート式は長距離測定・解像度に課題がありましたが、今般開発した受光技術により、ソリッドステート式(注2)において高解像度を実現しながら従来の4倍となる200メートルの長距離性能を実証しました。(注3)当社は2018年に機械式において、当時、世界最高となる200mの長距離測定性能を実現しましたが、今般開発した技術は機械式と同レベルの長距離性能の達成となります。
本技術は、1台の車両に対して複数のLiDARの搭載が必須となる、レベル4以上の高度自動運転の実現に大きく貢献します。当社はさらなる測定距離の延伸、高解像化および小型化についての研究開発を進め、2022年度までの実用化を目指します。
当社は、6月16日(日本時間)にオンライン開催された半導体回路国際会議VLSIシンポジウムで本技術を発表しました。
LiDARは、レーザ光を物体に反射させ、戻ってくるまでの時間を計測して距離を測る技術です。LiDARにより車の周辺環境を3D画像として把握することができ、高度な自動運転システムの実現に不可欠です。自動運転は自動化の程度により5つのレベルに分類されており、レベル2まではドライバー主体、レベル3は条件つきシステム主体、レベル4以上は高度自動運転と呼ばれ完全にシステム主体となります。自動運転を実現するには、1台の車に、レベル3では4台程度、レベル4では6台程度と複数のLiDARを搭載することが想定されています。さらに、今後はドローンやロボットへの搭載も期待されており、2024年の市場規模は6,600億円と予想されています(注4)。
一方で、従来のLiDARは、レーザと光の検出器を回転させて全方位を観測する機械式LiDARが主流です。機械式LiDARは駆動部にモーターを使用した回転機構を持つため、小型化・軽量化・低コスト化が難しいという課題があります。そのため、モーター等の機械部品を使用しないソリッドステート式LiDARの開発が求められています。ソリッドステート式は、回転機構を持たないため、全方位ではなくレーザの照射角の範囲でのみセンシングが可能で検知領域は小さくなりますが、小型・軽量で壊れにくく、設置場所の自由度を広げられるといった利点があります。また、回転機構を持たないことによりコストを下げることも可能です。しかし、ソリッドステート式は長距離性能と解像度がトレードオフの関係にあり、この両立が課題でした。
そこで、当社は、ソリッドステート式LiDAR向けに新たな受光技術を開発しました。従来困難だった超高感度受光デバイスSiPM(注5)の小型化を可能にし、高解像度と長距離測定性能の両立を実現しました。SiPMは、微かなレーザーの反射光を高感度に検出することが可能で、LiDARの長距離測定に適した受光デバイスです。
従来のSiPMでは、一度光を検出した受光セルは一定時間応答ができなくなるといった物理上の特性があり、漏れなく光を検出するためには非常に多数のセルを搭載することが必要でした。今般、SiPM上に受光セルを再起動させるトランジスタを搭載することで、受光セルが応答できない時間を短縮することに成功しました。これにより、少ないセル数でも効率よく光を検出できるようになり、SiPMの大幅な小型化を実現しました(図1)。小型SiPMを用いることで、限られたパッケージ面積内に多数のSiPMを配列することができ、高解像度化を図りました(図2、3)。
また、本受光技術は、市販のレンズと組み合わせて使用することができ、利用用途によって生じる複雑なカスタマイズが不要となります。乗用車、バス、作業車など、多様な車種への搭載が容易となり、今後、ドローンやロボットへの搭載も期待できます。
当社は、本技術を、市販のレンズを用いたシステム構成において実装し(図4)、高解像度を保ったまま、ソリッドステート式において従来比4倍となる200メートルの長距離測定性能を達成しました(図5)。
当社は今後も、実用化に向けた開発が進む運転支援・自動運転システム分野における研究開発を進め、より高度な自動運転システムの実現に貢献していきます。
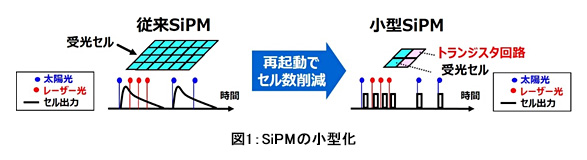
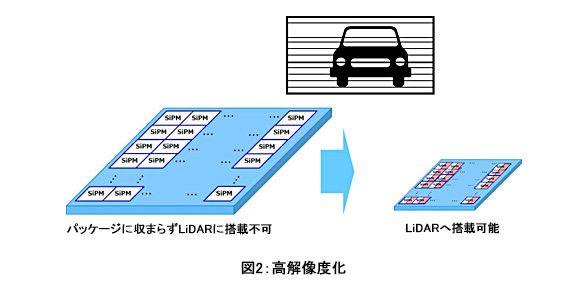
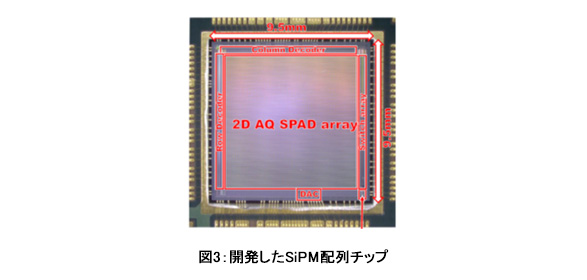
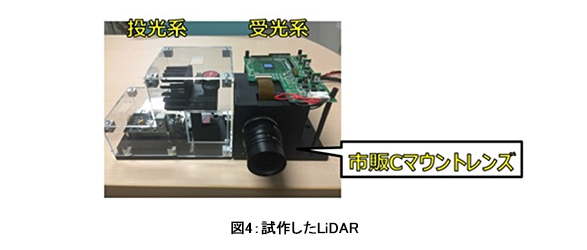
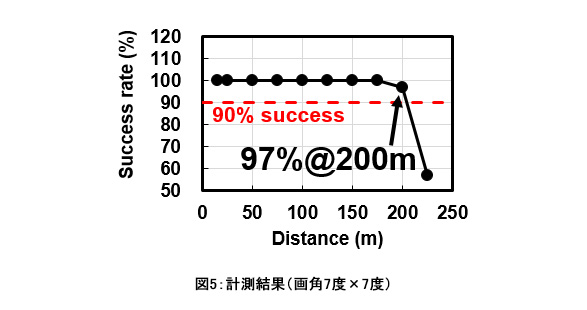
図6:計測結果(画角30度×30度)
(注1)Light Detection and Ranging:レーザの照射により、離れた物体までの距離情報を3D画像として得る 技術
(注2)当社は受光側をソリッドステート化可能な技術を開発。投光側は別途、走査範囲の広いMEMSミラーの開発が必要。
(注3)画角7度×7度で達成。
(注4)LiDAR for Automotive and Industrial Applications 2019 report. Yole Development, March 2019
(注5)SiPM (Silicon Photo Multiplier): 1光子を受けると、100万電子に変換する光検出デバイス。サイズ~100µm角