物流の未来をつくる、
東芝の最先端技術
人々の暮らしに不可欠な物流において、現場の労働力不足が問題となっています。またネットショッピングの拡大などの理由により、従来より速いスピードで「必要な時に必要なものが届くこと」が求められています。そのような物流業界の課題を解決し、よりよい未来の創造に貢献すべく、私たちは次のような技術開発を進めています。
データ化
物理的な情報をデータ化し、DXの土台作りに貢献
解析
データ化された情報を解析し、新しい価値を創造
自動化
人の作業を自動化し、労働力不足に対応
データ化
近年、物流業界においても、データ活用が進められています。
人やモノの情報がデータ化されることで、業務効率化やスピーディな配送を実現できます。
私たちは、これからの物流業界で不可欠となっていくデータ化を促進するために、AI(深層学習)を用いた最先端技術の開発を進めています。
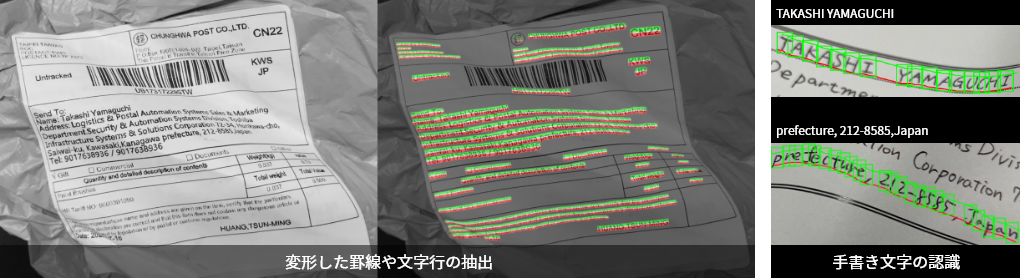
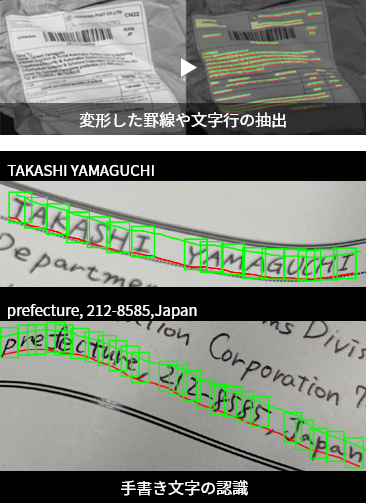
OCR(光学的文字認識)
物流業務のデジタル化に不可欠な、宛先伝票などの「文字情報のデータ化」を実現
OCR(Optical Character Recognition/Reader)技術は、カメラで読み込んだ文字をデジタルデータに変換します。
文字情報をデータ化することで、物流DXの土台を作ります。
東芝独自のAI(深層学習)技術により、手書きで歪んだ文字を正確に認識し、複数の情報の中から特定の文字のみを切り出すことが可能!
他社と比較して、東芝のOCRは手書き文字に対する高い読取率を誇っています!
ユースケース
商品の宛名や賞味期限を人の代わりに読み取り、仕分け・管理することができます。
パッケージ認識
バーコードなどの識別コードに代わる、新しい「モノの識別方法」
スキャンされた物体の見た目(パッケージ)をAI(深層学習)を用いて解析することで、読み込んだ物体が何かを認識することができます。
スーパーマーケットが扱う約6,000商品の画像データセットを用いた評価実験の結果、約97%の商品を特定できることを確認!

ユースケース
JANコードなど、識別コードが記載されていない商品や、コードが歪んでいる商品をデータ化し、入出庫や在庫の管理に活用することができます。
解析
物流業界において、データ化された情報を活用するDXが求められています。DXによって、企業は従来の業務プロセスを効率化し、競争力を維持・向上させることができます。
私たちは、物流業界のDX実現に向けて、データを解析する最先端技術の開発を進めています。
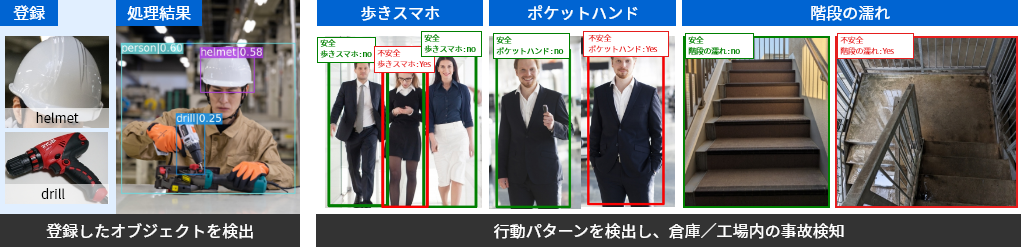
映像解析AI
世界最高精度で、映像の中から特定の物体・人物を検出
事前に検出したい物体や人物、行動パターンの画像を1枚登録するだけで、別の映像内に映っている物体・人物を解析し、それらの中から検出したい対象を探し出すことができます。
映像に複数の物体・人物が映っていても、それらの物体・人物の状態を解析し、特定の条件に当てはまる対象を検出することができるのは、東芝だけ※1!世界的標準の公開データセット※2を用いた性能評価において、画像に対する質問に世界最高精度※3で回答!
※1: 特許出願済み ※2: VQA-v2 ※3: 2021年4月時点

ユースケース
カートや工具など、任意の物体が画像・映像上のどこにあるかを検出することができます。
異常姿勢(倒れ・うずくまり・ポケットに手を入れている)の人の検索により、倉庫・工場内の事故検知・防止を実現し、安全性の向上に繋げることができます。
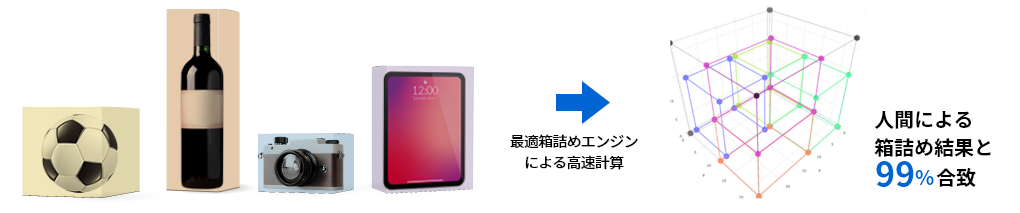
最適箱詰めエンジン
スピードが求められる現代の物流に対し、独自のアルゴリズムで業務効率化をサポート
箱詰めしたい物体のデータをもとに、物体のサイズや数量に合わせた最適な箱詰め方法を即座に自動計算することができるエンジンです。
東芝独自のアルゴリズムで、人間が考える適切な箱サイズ・箱詰め方法を、人間より高速で計算可能!
EC倉庫の実運用データ80,000件のうち、熟練作業者が行った箱詰め結果と最適箱詰めエンジンの計算結果が99%合致することを確認!

ユースケース
出荷する商品のサイズ・重量・形状・数量・種類に合わせて、どの梱包材が適切か作業者が考える時間を削減します。
自動化
近年、労働人口の減少が社会問題となっており、物流業界でも、労働力不足への対策が求められています。働き手が減っていく中で、現状のサービスレベルを維持したまま業務を継続するには、今後ますます人が行っている作業を自動化するシステムや仕組みが必要となるでしょう。
私たちは、このような社会問題を解決すべく、自動化の技術を開発しています。
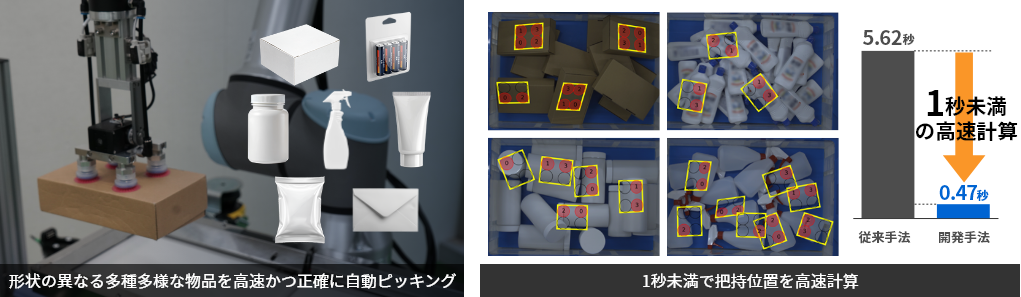
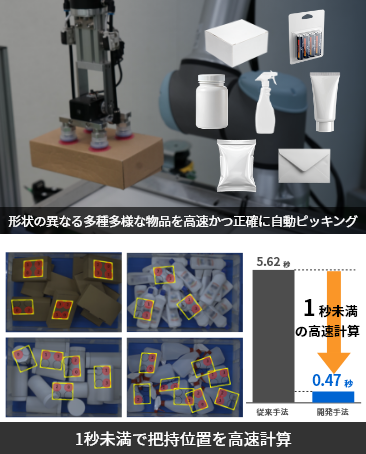
ピースピッキングロボット
形状や外観の異なる多種多様な商品を人間のように高速かつ正確に把持可能。人とロボットの協働を目指します。
物体を特定の場所から持ち上げ、別の場所へ置き換えるロボットです。「完全自動化」の前段階として「人との協働」を目標としており、省スペースで簡単に設置・運用ができるよう開発を進めています。
独自開発したAIにより、「どのような商品をどのように持つか」を高速で計算!事前にAIにいくつかの商品を学習させておけば、様々な商品をマスター登録なしでピッキング可能!
ユースケース
人が行っていたピッキング作業を一部自動化することで、省人化・労働環境の改善・生産性向上が期待できます。例えば、昼間に人が作業していたピッキングステーションで、夜間はロボットが無人で出庫作業を行うことができます。
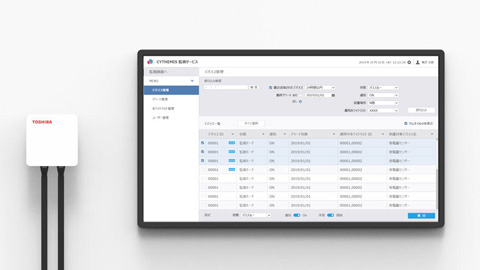
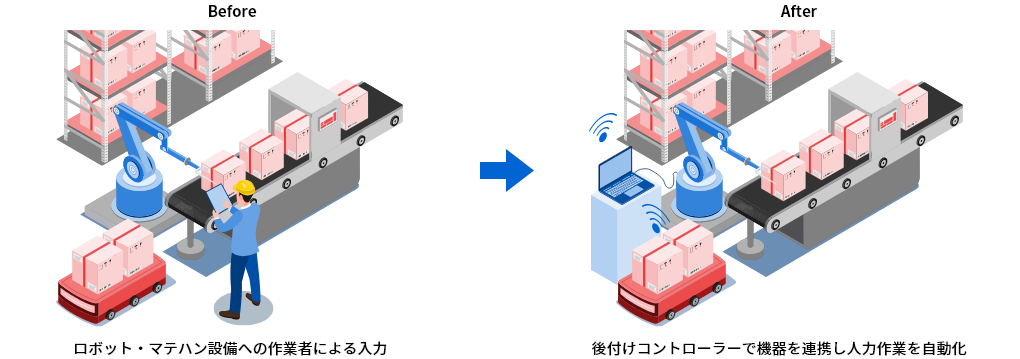
あやつり™制御技術
ロボット・マテハン設備の人手操作を自動化し、労働力不足に対応
ロボット・マテハン設備への作業者による入力や操作を自動化し、無人で様々な設備・システムを動作させることができます。
従来、人がロボット・マテハン設備の画面で行っていた操作を、人の代わりに自動で操作することができるようになります!
既存設備のインターフェース開発・改造は必要なく、物理的な後付けのみで操作の効率化が可能!
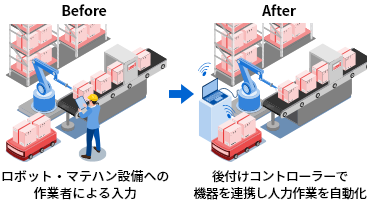
ユースケース
新しい設備導入時にあやつり™制御技術の後付けコントローラーを介在させることで、既設システムの改造や人の介在なしで新設備と既存設備を連携させることができます。