This page partially uses JavaScript. This page may not operate normally when these functions are not supported by your browser or the setting is disabled.
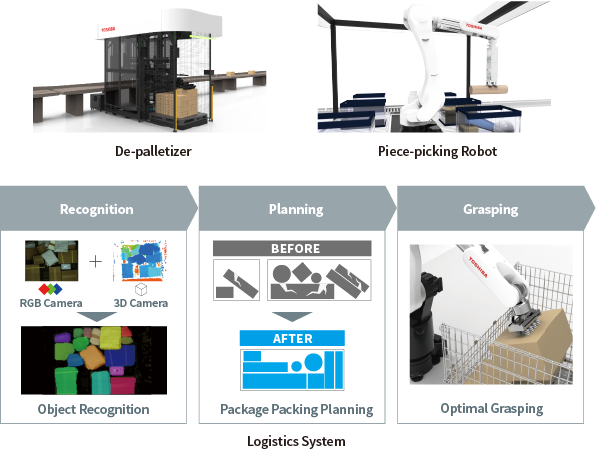
Development of object recognition and grasping technology for logistics automation solution using robot