
TOKYO—Toshiba Corporation and Toshiba Infrastructure Systems & Solutions Corporation have developed world-first technologies for the control of robot movement routes based on radio maps as part of NEDO (New Energy and Industrial Technology Development Organization) ’s “Research and Development Project of the Enhanced Infrastructures for Post-5G Information and Communication Systems”, successfully controlling a mobile robot swarm in real time using a server centralization technology and Local 5G.
Functions corresponding to the robot’s “brain” are centralized on the server side, with the robot itself focusing on transportation functions, thereby reducing per-robot costs and power consumption. Conventional server- centralized approaches face the problem of robots stopping due to signal delay or interference, but this problem was resolved by utilizing Local 5G with low latency and low fluctuation characteristics and by incorporating a dynamic routing control function based on a radio map that is constantly updated with information from the robot swarm. This is expected to reduce the cost of installing automated transportation systems in medium- and large-scale distribution warehouses and factories by approximately 10% while reducing robot power consumption by approximately 14% and improving operation rates by approximately 16%.
Furthermore, a cooperative transport technology was developed in which robots of the same type and size can cooperatively pass and convey a package. There is thus no need to dispatch different types and sizes of robots according to the size and weight of the conveyed items, further reducing the cost of introducing an automated transportation system.
Toshiba and Toshiba Infrastructure Systems & Solutions will continue conducting demonstrations in distribution warehouses and factories, aiming to commercialize the system by 2025 and thereby to improve logistics efficiency and resolving labor shortages.
1. Background
There is a growing need to significantly increase logistics volumes due to the revitalized e-commerce market and strengthened supply chains, but Japan’s shrinking labor force due to population decrease is a pressing issue. Also of concern is the so-called “2024 problem,” an expected shortage of transportation capacity due to limits on driver overtime work that will take effect in Japan in April 2024. In response to these issues, distribution warehouses and factories are improving logistics efficiency through means such as introducing automated transportation systems (*1).
To prevent control errors due to communication delays and fluctuations, current automated transportation systems using autonomous robots do not rely on communication functions comprising the robot’s “brain,” such as movement planning, position estimation, route control, and movement control. Instead, these are performed on the robot itself. The robots must therefore be highly functional, resulting in high per-unit installation costs and power consumption and making it expensive to install multiple robots in medium- to large-scale distribution warehouses and factories (Figure 1, left). Increased power consumption also means robots must recharge more frequently, directly decreasing operation rates. Accommodating variations in transported item sizes and weights also increases costs because different types and sizes of robots are needed.
Against this background, as part of this NEDO-consigned project (*2), Toshiba and Toshiba Infrastructure Systems & Solutions conducted research and development of mobile robot control technologies for automated transportation systems in the post-5G era (*3).
2. Achievements
(1) Server centralization technology using Local 5G to control robot routing
By developing a system in which the robots themselves are equipped with only the minimum necessary transport functions, where functions corresponding to the robots’ “brain” are centrally controlled by a server, Toshiba succeeded in real-time control of a swarm of 12 robots. Conventional server centralization technologies have problems when control signals cannot reach the robot due to signal delay or interference, causing the robot to stop, but such problems have been resolved by utilizing Local 5G (*4), which features low latency and low fluctuation characteristics.
The result is lower per-robot costs and power consumption. This approach is also expected to improve operation rates by reducing the frequency of recharging.
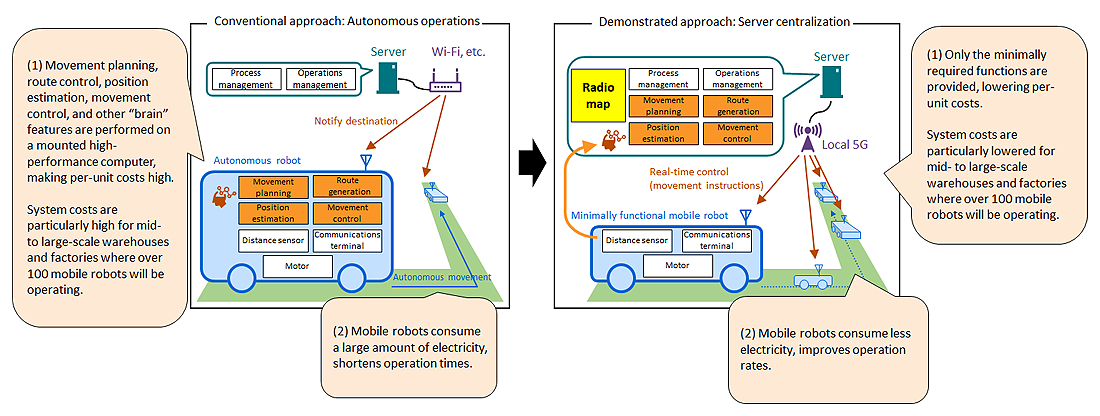
Figure 1: Automated transportation systems. (Left) Conventional approach. (Right) Server centralization approach.
(2) Development of a world-first dynamic routing technology based on radio maps
In conjunction with (1) above, Toshiba developed a world-first (*5) technology for controlling robots’ movement routes based on radio maps. The physical environment in distribution warehouses and factories constantly change as goods are brought in and out, and the signal environment, too, fluctuates according to the presence or absence of obstacles. Toshiba and Toshiba Infrastructure Systems & Solutions devised a method for server-side mapping of Local 5G signal conditions as monitored by the robots while they are moving, developing a technology to dynamically control robots’ travel routes according to the strength or weakness of received signals. The robots continuously monitor received signal strengths along their travel routes and transmit that information to the server from an embedded communication terminal, thereby generating a map of signal conditions along each route. The radio map is continuously updated with information about received signal strength from the robot swarm to keep it up to date. The server can thus predict received signal strengths along travel routes based on changes in the radio map and thereby select appropriate routes for the robots. This allows the robot swarm to continue traveling along routes with sufficient reception strength without stopping (Figure 2, Video 1). The radio maps can be generated without installing additional equipment, because they utilize existing communication terminal functions (received signal strength acquisition functions) already installed in the robots.
(3) Introduction costs for automated transportation systems reduced by approximately 10%, robot utilization rates improved by approximately 16%
In this study, Toshiba used a swarm of 12 robots for demonstration purposes, but the system is applicable to medium- to large-scale distribution warehouses and factories with over 100 operating robots through a scalable system configuration that is adaptable to the number of robots. The developed and demonstrated automated transportation system with server centralization is expected to reduce the cost of introducing automated transportation systems in medium- and large-scale distribution warehouses and factories by approximately 10%, to reduce power consumption by approximately 14% by reducing the functionality of the robots themselves, and to improve operation rates by approximately 16% (assuming 100 robots).
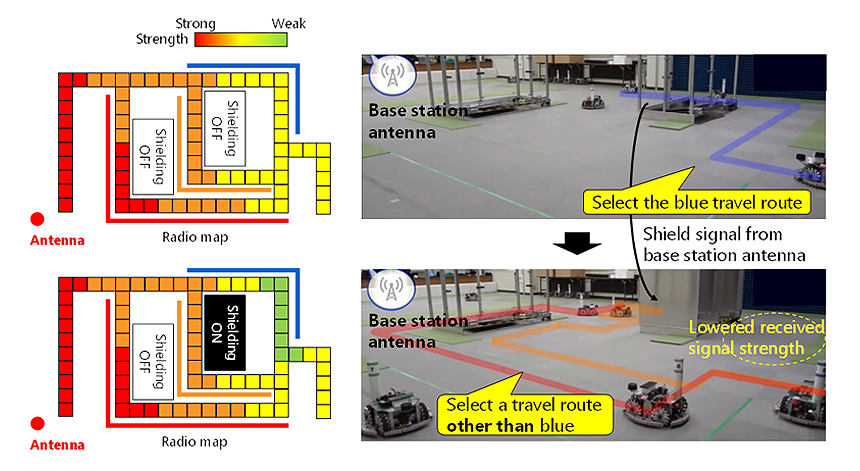
Figure 2: Demonstration of the technology for dynamically controlling robot travel routes based on a radio map.
Video 1: Dynamic route control of a robot based on the radio map developed in this study.
- Click Play button to start movie. YouTube is the service provided from other company, and please follow the terms of use in YouTube.
(4) Development of cooperative transport technology with server centralization enabling multiple robots to transport larger loads
Introducing different types and sizes of robots to accommodate varied item sizes and weights increases costs. Toshiba has thus developed a cooperative transport technology (*6) that uses direct between-robot communication to transport each object. This technology has been applied and demonstrated in a server-centralization approach using Local 5G (Video 2). This enables multiple robots of the same type and same size to transfer items regardless of size or weight, further reducing costs associated with introducing an automated transportation system.
Video 2: Cooperative transport of one cart by two robots.
- Click Play button to start movie. YouTube is the service provided from other company, and please follow the terms of use in YouTube.
3. Future plans
Toshiba and Toshiba Infrastructure Systems & Solutions will continue to conduct demonstrations in distribution warehouses and factories, with the aim to commercialize the system in 2025 thereby to help improve logistics efficiency and mitigate labor shortages.
*1: Logistics efficiency is being improved through the introduction of automated transportation systems, etc.
Ref: Yano Research Institute Ltd. Press Release (January 31, 2023), “Logistics Robotics Market in Japan: Key Research Findings 2022”
https://www.yanoresearch.com/en/press-release/show/press_id/3184
*2: This project
Project name: Research and Development Project of the Enhanced Infrastructures for Post-5G Information and Communication Systems / Feasibility Study (Commission) / Research and Development of Real-time Cloud Robotics Technologies
Project period: FY2020–2023
Project overview: https://www.nedo.go.jp/english/activities/activities_ZZJP_100172.html
*3: Post-5G
This refers to the fifth-generation mobile communication system (5G) with enhanced features such as ultra-low latency and many simultaneous connections.
*4: Local 5G
This new framework allows entities such as local businesses and municipalities to flexibly build and use networks separate from nationwide 5G services provided by cellphone operators on a spot basis within their own buildings and premises.
*5: World-first
This is a world-first development of dynamic routing based on predictions from a radio map that a group of robots constantly updates (according to a Toshiba survey conducted on 30 November 2023).
*6: Development of a cooperative transport technology that uses direct between-robot communication for multiple-robot transport of objects.
Ref: Toshiba news release (September 17, 2021), “Toshiba Develops Cooperative Coordination System for Mutual Avoidance and Coordinated Transport between Mobile Robots”
https://www.global.toshiba/jp/technology/corporate/rdc/rd/topics/21/2109-03.html (in Japanese)