
概要
株式会社東芝(本社:東京都港区、代表執行役社長 CEO:島田 太郎、以下 東芝)と東芝デジタルソリューションズ株式会社(本社:神奈川県川崎市、取締役社長:岡田 俊輔、以下 東芝デジタルソリューションズ)は、高速道路において重大事故につながる可能性のある路面の穴(以下、ポットホール(図1))を、リアルタイムかつ高精度に検知する路面変状検知AIを開発し、中日本高速道路株式会社(本社:愛知県名古屋市、代表取締役社長CEO 小室 俊二、以下 NEXCO中日本)と共同で進める高速道路の日常点検の高度化に向けた実証実験において、本AI技術の有効性を検証しました。これにより、本AIを活用したポットホール検知システムの実用化に目途が立ちました。
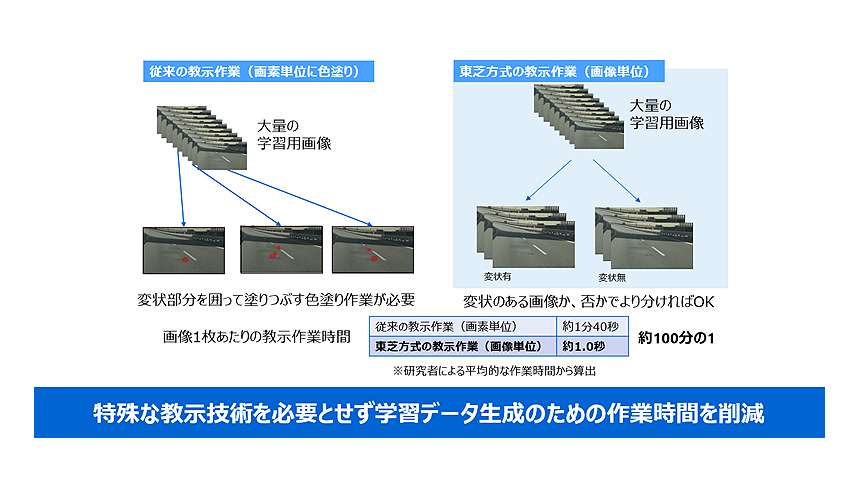
東芝と東芝デジタルソリューションズが開発した路面変状検知AIは、世界で初めて(*1)ポットホールの検知において弱教師学習の手法を適用し、変状の有無を選別して学習するだけで画像内の変状位置を推定します。弱教師学習を用いることで、画像1枚あたりの教示作業時間を従来と比較して約1分40秒から約1秒と、約1/100に短縮することができ(図4)、導入時の作業負荷を抑えるとともに、容易に異なる道路で本AIを導入することができるようになります。
今般、NEXCO中日本との共同実証実験では、NEXCO中日本の車両に搭載したカメラで収集した画像に本AIを適用し、高速道路の走行中にリアルタイムにポットホールを高精度に検知する技術の有効性を検証しました。本AIは、高速道路の日常点検の自動化・省力化に加え、緊急補修が必要なポットホールの早期発見を実現し、高速道路の保全と長期的な安定稼働に貢献します。
東芝は、本AIおよび今回の実証実験の詳細について、9月11日から東京で開催されるインフラ保全の国際会議「PHMAP23」にて9月12日に発表します。

開発の背景
現在、国内では、開通から30年を超える高速道路が5割以上を占めています。高速道路は、高速走行や交通量の多さにより常に利用者の車両による摩耗を受けており、近年、老朽化による路面変状の発生頻度の増加が顕在化してきています。走行中にハンドルを取られ重大事故につながる危険があるポットホールは、NEXCO中日本管内の高速道路で2019年度には約3,200件の発生が確認されています。ポットホールは初期の状態では路面変状が現れにくく、路面に変状が確認されると比較的短期間で路面損傷へと進展する特徴があり、早期発見・早期修繕が不可欠です。
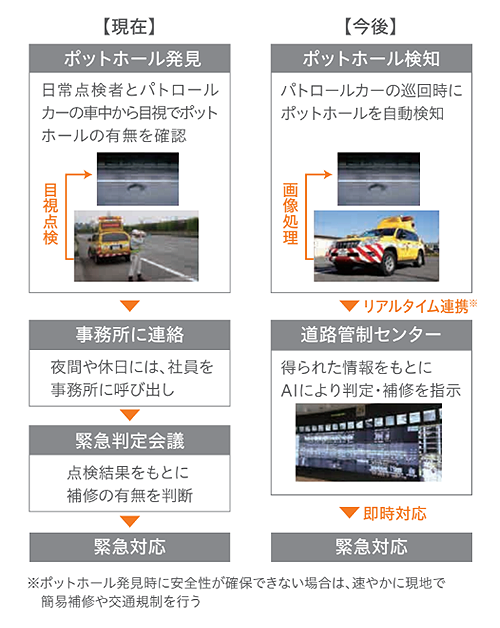
路面変状による事故を未然に防ぐために、高効率・高精度な日常点検の実施が重要となる中、現在の点検は、点検員が車両に乗り込み、路面や標識などさまざまな点検対象の確認を目視で行っています。ポットホールについては、定期的に車両で巡回している点検員が緊急補修を要するポットホールを目視確認すると、安全に停車できる場所を探して降車し、ポットホールの場所まで戻り、写真撮影・道路管制センターへの通報・緊急補修を実施する対応を行っています。発生箇所によっては停車が難しく、次のインターチェンジまで行き、降りて再度同ルートを通ってポットホール付近に向かうといったように、時間的ロスが大きいケースも生じています。また、目視による点検は、点検品質のばらつきにもつながります。
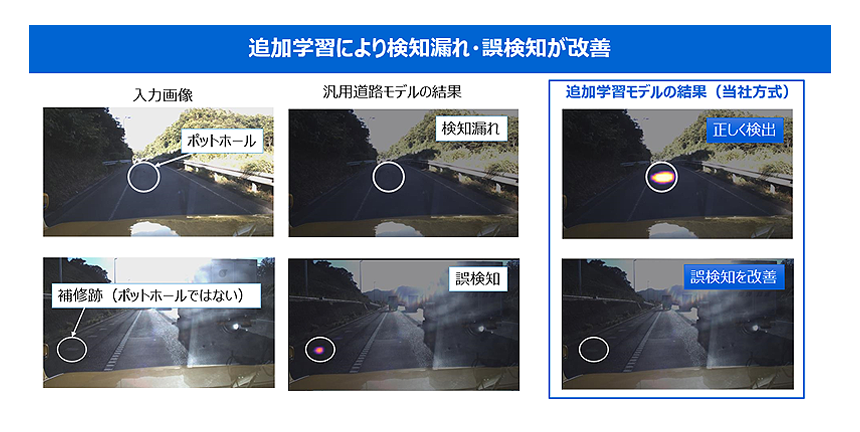
車両にカメラを搭載し、収集したカメラ画像にAIを用いて走行中にリアルタイムかつ自動でポットホールの検出・通報ができれば、点検品質の平準化に加え、作業員の安全を確保しながら緊急補修までの時間を大幅に短縮することができます(図2)。しかし、画像内の変状位置を含めて検知するAIは、従来の方式では、大量の学習用画像に変状位置を画素単位で教示する作業が必要となり、学習データの作成に多大な時間とコストがかかります。また、学習データと異なる変状や道路への適用が難しく、検知漏れや誤検知が大量に発生するという課題がありました。
本技術の特長
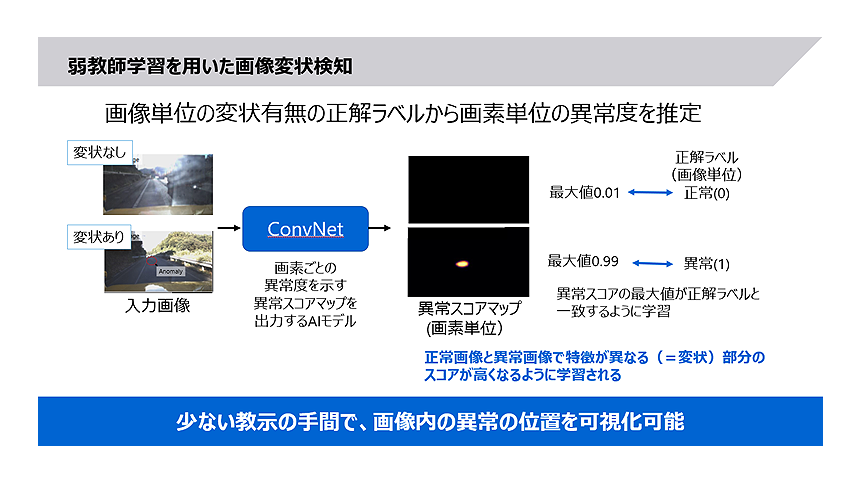
そこで東芝は、変状の有無を選別して学習するだけで、画像内の各画素の変状度合いから変状の有無と変状の箇所を推定する弱教師学習型のAI技術を開発しました。本AIは、入力した画像に対して異常スコアマップを出力する深層モデルを用い、異常スコアマップの最大値と入力画像の変状有無が一致するように学習させることで、正常画像と異常画像の特徴の異なる部分、すなわち変状部分のスコアが大きくなるような異常スコアマップを出力します(図3)。本AIにより、画像1枚あたりの学習データ作成する教示作業時間は従来と比較して約1分40秒から約1秒と、約1/100に短縮することができます(図4)(*3)。
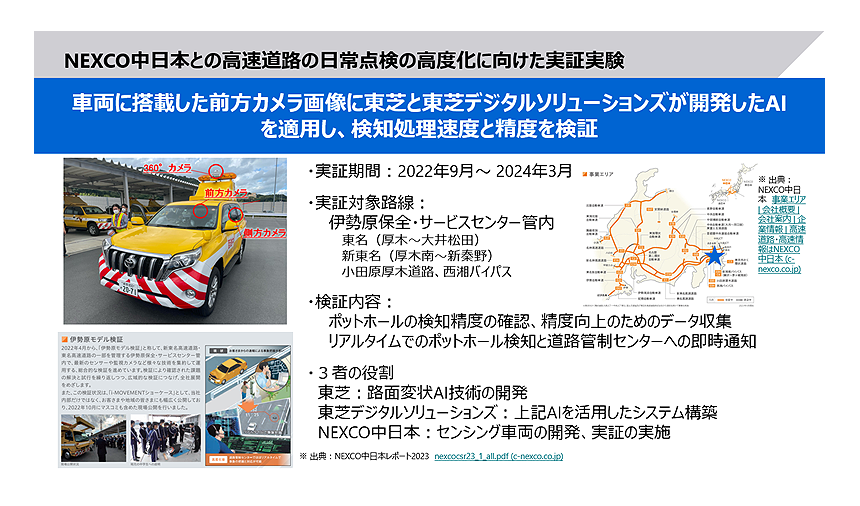
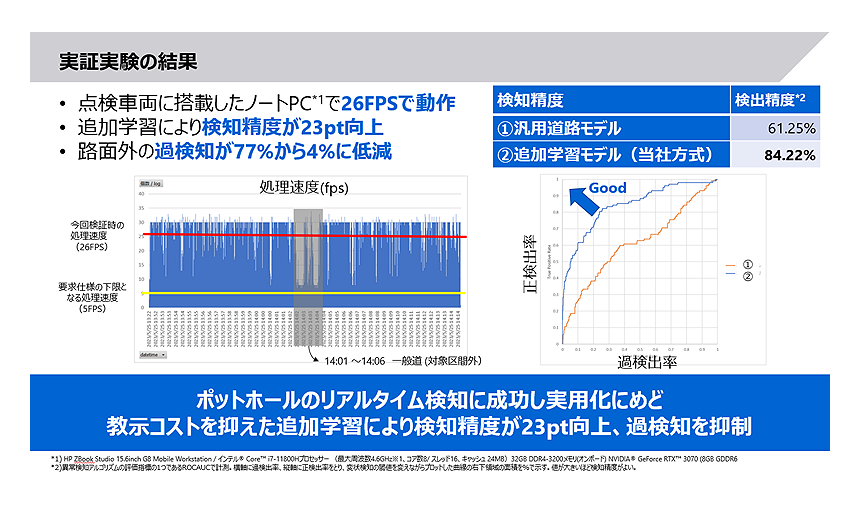
東芝デジタルソリューションズは、本AIを用い、車両に搭載したカメラで撮影した画像を解析し、道路管制センターにリアルタイムで情報共有するシステムを構築しました。東芝と東芝デジタルソリューションズは、2022年9月からNEXCO中日本と共同で進める高速道路の日常点検の高度化に向けた実証実験において(図5)、NEXCO中日本の車両で伊勢原保全・サービスセンター管内の新東名高速道路・東名高速道路等を走行して路面画像を収集し、NEXCO中日本の知見を用いて、ポットホールの有無のみを選別した学習データを作成しました。本学習データを用いて追加学習した世界初(*4)のポットホール検知モデルを用いることで、一般道の画像で学習した汎用道路モデルと比較して検知精度はROCAUC(*5)で61.25%から84.22%に向上しました(図6)。また、路面外の過検出を77%から4%に抑えつつ、時速80km~100kmで走行しながらポットホールの可能性がある箇所をリアルタイムに検知可能なことを確認しました(図7)。本実証実験を通じて、東芝と東芝デジタルソリューションズが開発した路面変状検知AIがリアルタイムかつ高精度にポットホールを検知できること、学習データの整備の作業負荷を大きく抑えつつ、検知モデルの精度向上が可能なことが確認でき、2024年度の実用化に目途が立ちました。
今後の展望
東芝および東芝デジタルソリューションズは、今後もNEXCO中日本と実証実験を進め、緊急補修が必要なポットホールの検出精度を向上させ、2024年度のポットホール検知システムの実用化を目指します。
*1 2022年12月8日にViEWビジョン技術の実利用ワークショップにて、一般道の公開データセットを用いて世界で初めてポットホール検知に弱教師学習を適用したAIモデルを開発したことを発表済み。世界初は2022年9月東芝調べ。
伊藤聡, "Multiple Instance Learning を用いた複数種類の路面変状検知," ViEWビジョン技術の実利用ワークショップ, OS1-O3, Dec. 2022.
https://view.tc-iaip.org/view/2022/
*2 NEXCO中日本レポート2023 p37
https://www.c-nexco.co.jp/corporate/csr/csr_download/documents/2023/nexcocsr23_2_all.pdf (PDF形式)
*3 研究者による平均的な作業時間から算出
*4 高速道路のデータを用いて弱教師学習の手法で追加学習したモデルを開発したこと、そのAIを用いて高速道路で実証し、技術の有効性を示したことが世界初。2023年8月東芝調べ。
*5 異常検知アルゴリズムの評価指標の1つ。横軸に過検出率、縦軸に正検出率をとり、変状検知の閾値を変えながらプロットした曲線の右下領域の面積を%で示す。値が大きいほど検知精度がよい。