
情報通信プラットフォーム
脳の空間認知機能を小型の脳型AIハードウェアで再現
-小型ロボット等への実装を可能とし、空間認知機能を備えた自律走行の実現へ-
2019年05月27日
株式会社東芝
当社はジョンズホプキンス大学と共同で、世界で初めて、脳内で空間認知をつかさどる海馬の機能の一部を小型な脳型AIハードウェアで模倣・再現させることに成功しました。今後、高い空間認知能力が求められるインフラ点検向け自律移動型ロボット等の小型化に向けた活用が期待できます。また、今回の成果をさらに発展させることで、より複雑な脳機能を小型ハードウェアで模倣・再現し、様々な分野で高知能化したAI技術を実装することが可能となります。
当社は本技術の成果を、札幌市で開催されるIEEE国際学会(回路とシステム)にて、5月29日に発表します。
脳内での情報伝達の際に起こる、神経細胞やシナプスにおける発火現象を忠実に模倣し、脳機能の一部を再現する技術を「ニューロモルフィック(脳型)」情報処理技術と言い、開発した情報処理技術を実装したハードウェアを「ニューロモルフィックハードウェア(脳型AIハードウェア)」と言います。当社はこのたびジョンズホプキンス大学と共同で、ネズミの海馬の空間認知機能に関するニューラルネットワークの一部を再現する脳型AIハードウェアを開発し、脳機能とほぼ等価な神経細胞の反応が再現できることを実証しました。
近年、人間の脳が持つ機能を小型なデバイスで再現するAI技術の開発が世界中で進められています。例えば、自動運転や産業用ロボット、災害対策用ロボットなどの分野でこうした技術が実現できれば、これまでの機械やコンピュータではできなかった、極めて高度な情報処理が小型・低電力のデバイスで実現することが可能となり、より安全で効率的な社会の実現が期待されます。また、医学の分野では脳神経科学の研究が進み、脳の仕組みが解明されるにつれ、その仕組みをAI技術へ応用することができると考えられています。
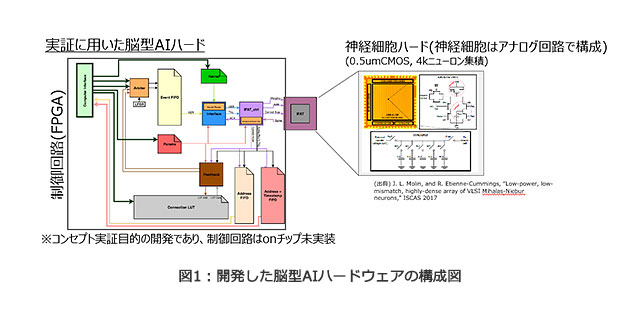
現在、脳内の動きを模倣したハードウェアの主流は、深層ニューラルネットワークをデジタル処理する「DNN型ハードウェア」です。一方で、脳内の情報伝達は、デジタル処理ではなく、神経細胞のアナログ処理が発する電気的信号でやりとりされており、空間認知等の脳機能を忠実に模倣するためには脳の神経細胞やその動作をアナログ処理により再現する脳型AIハードウェアの実現が必須となりますが、脳に関する専門的な知識とハードウェアの設計技術力が必要となるため実現が難しいとされていました。当社は、脳神経科学、生理学や工学分野が融合するジョンズホプキンス大学との共同研究において、同大学が保有する脳の神経細胞を忠実に再現する神経細胞回路設計技術や神経細胞の制御技術を開発し、当社の回路実装技術を組み合わせることにより、脳型AIハードウェアの構築を実現しました。
今回の開発において、当社とジョンズホプキンス大学はネズミの海馬に着目しました。脳神経科学分野において最もよく研究されている分野の一つに、海馬において空間認知をつかさどる神経細胞である場所細胞と格子細胞(注1)に関する研究があります。ネズミの場所細胞と格子細胞は、ネズミが特定場所にいるときのみ反応(発火)するとされています。論文で公表されているニューラルネットワークモデルや数理モデルを元に、場所細胞と格子細胞の模倣動作に必要なハードウェアの構成や制御技術、さらには神経細胞の発火信号にポアソン分布(注2)をもったノイズを引火する技術を開発し、神経細胞ハードウェアと専用の制御回路と組み合わせて脳型AIハードウェアとして実装することに成功しました(図1)。この脳型AIハードウェアによる実証実験により、場所細胞の発火による発信現象を再現でき脳神経科学で示された結果とほぼ等しい結果を得ることができました。
同種の実験結果は過去に発表事例がなく(注3)、脳型AIハードウェアを用いた脳機能再現の研究開発を加速することができ、将来は自律移動型ロボット等の小型化向けた活用が期待できます。当社は、今後、脳型AIハードウェアのさらなる小型化の実現に向け研究を進め、脳神経科学の進歩とともにAIのさらなる高知能化を目指します。
(注1)2014ノーベル生理学・医学賞 John O' Keefe 海馬における場所細胞および格子細胞の発見
(注2)離散型確率変数が従う確率分布の代表例のひとつ。一定時間または空間の間に偶発的に生じるような事象の多くが、ポアソン分布に従うことが知られている。
(注3)当社調べ