
Overview
Kawasaki and Nisshin, Japan – Toshiba Corporation (“Toshiba”) and MIRISE Technologies Corporation (“MIRISE”) have together demonstrated the effective application of advanced control technologies to autonomous mobile systems by installing the Simulated Bifurcation Machine (SBM)*1, Toshiba’s proprietary quantum‑inspired optimization computer, on an autonomous mobile robot developed by MIRISE.
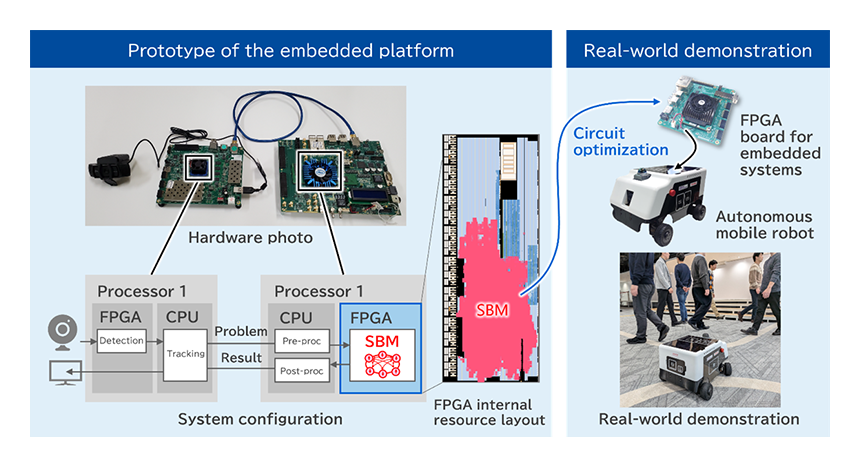
Quantum‑inspired optimization computers use algorithms derived from quantum computing to generate rapid solutions to complex combinatorial optimization problems. In autonomous systems such as vehicles and mobile robots, it is increasingly difficult to process ever more sophisticated information in real time under strict constraints on size, power consumption and cost. Toshiba has overcome these limitations by developing a multi‑object tracking algorithm on the SBM, and used its proprietary circuit design technology to implement it on an embedded FPGA*2. MIRISE then integrated the FPGA into an autonomous mobile robot and successfully demonstrated real‑time autonomous navigation.
While quantum‑inspired optimization computers such as SBM have previously been developed and used for centralized control of mobile systems, this is the world’s first instance of embedding such a computer directly inside a mobile platform and applying it to autonomous control*3. The results have been published in Nature Communications and two other academic journals*4,*5,*6.
Development background
Driven by labor shortages, demand for self-driving vehicles and autonomous mobile robots is growing fast in logistics, smart mobility and other industrial fields, and steady progress has been made in implementation. These systems must be able to “see”— detect and track routes and obstacles using cameras and LiDAR—and make decisions— plan and determine actions—in real time, within short control cycles. They must also satisfy stringent limitations on size, power consumption and cost. Balancing these constraints with increasingly sophisticated processing requirements has become a major technical challenge.
The algorithms of quantum‑inspired optimization computers can rapidly solve complex combinatorial optimization problems. Unlike quantum computers, they do not require dedicated quantum hardware or specialized peripheral equipment, and operate on standard hardware, such as FPGAs, GPUs*7, and ASICs*8. These characteristics make them a promising candidate for advanced decision‑making in autonomous driving and robotics.
Features of the technology
Toshiba and MIRISE took on the challenge of control of autonomous mobile systems by developing a prototype embedded platform using the SBM quantum‑inspired optimization computer, and verified its effectiveness through experiments on actual hardware. At the heart of their solution is a new multi‑object tracking algorithm that can continuously track individual objects, even in environments where multiple people, vehicles and objects move simultaneously with frequent crossing and recrossing of routes and obscuring of objects. (Video)
Current methods often suffer from tracking interruptions or misidentification when objects overlap or are temporarily obscured. In multi‑object tracking, the association of detected objects with tracked objects are formulated as a combinatorial optimization (matching) problem. In addition to conventional one‑to‑one matching, the new algorithm exploits SBM’s large‑scale, high‑speed search capability to identify potential one‑to‑many matchings, enabling accurate identification of obscured objects.
As a result, re‑tracking becomes possible even after something is obscured, improving object motion prediction accuracy. Evaluations using the Higher Order Tracking Accuracy (HOTA)*9 metric showed a 4% improvement against standard multi‑object tracking benchmarks*10,*11 and a 23% improvement against newly constructed benchmarks designed specifically for evaluation of object obscuration. The results demonstrate that the technology clearly contributes to safer and smoother operation of automated vehicles and autonomous mobile robots in complex, crowded environments.
Video: Demonstration of multi‑object tracking (Link to video)
Implementation of SBM on an Embedded FPGA
The SBM is a quantum‑inspired optimization computer with high parallelism that allows simultaneous execution of many computations. Leveraging this characteristic through its proprietary circuit design technology, Toshiba achieved high‑speed operation, even on embedded FPGAs with strict performance and power constraints (Figure).
In detail, the system demonstrated processing for repeated detection and tracking in multi‑object tracking at a rate of 23 frames per second (FPS), far exceeding the 10 FPS typically required for automated driving. This advance allows advanced optimization processing—which previously required high‑performance servers or dedicated equipment—to be executed in real time on compact, low‑power embedded devices such as in‑vehicle systems and robot control units.
Verification on an Autonomous Mobile Robot
Toshiba and MIRISE conducted real‑world experiments by mounting the FPGA with the newly developed algorithm on an autonomous mobile robot developed by MIRISE. The robot successfully demonstrated path planning while avoiding multiple moving objects. (Figure)
MIRISE enhanced path planning that must factor in moving objects by developing a mechanism that utilizes object tracking information from the SBM. It analyzes positional confidence and movement direction to dynamically adjust object occupancy areas and predict future positions, reducing unnecessary avoidance maneuvers and securing efficient navigation.
Using cameras and sensors in combination with the multi‑object tracking technology, the autonomous mobile robot was able to select efficient paths in real time, even in environments containing both static and dynamic objects.
Future developments
Toshiba and MIRISE will continue to expand application of the embedded quantum‑inspired optimization computer to a broad range of autonomous control use cases, including automated vehicles and robotics. Future applications include cooperative control of multiple autonomous mobile units, route optimization in more complex environments, and real‑time task allocation—addressing a wide variety of challenges encountered in real‑world settings. The companies also aim to extend the technology to a wide range of embedded systems, including transport robots in factories and warehouses, autonomous machines in construction and agriculture, smart cities, infrastructure monitoring, and energy management systems, thereby contributing to advances in society and industry.
About the Quantum-Inspired Optimization Computer

- https://www.global.toshiba/ww/technology/corporate/rdc/rd/quantum-computer.html#Quantum_Inspired_Computer
- FPGA: Field-Programmable Gate Array
- Research by MIRISE and Toshiba
- K. Tatsumura, Y. Hamakawa, M. Yamasaki, K. Oya, H. Fujimoto, “Enhancing vehicle-mountable multiple object tracking systems with embeddable Ising machines,” Nature Communications 17, 584 (2026). https://doi.org/10.1038/s41467-025-67282-7
- (In Japanese) K. Oya, H. Fujimoto, Y. Hamakawa, M. Yamasaki, K. Tatsumura, “Proposal and prototyping of automotive computing platform with Quantum inspired Processing Unit,” Trans. of Soc. of Automotive Eng. of Japan 54, 1216, 2023, https://doi.org/10.11351/jsaeronbun.54.1216
- (In Japanese) M. Hirai, R. Isobe, Y. Kuriya, I. Hamada, K. Kitamura, Y. Ishigaki, Y. Hamakawa, M. Yamasaki, Y. Yamada, K. Tatsumura, “Demonstration of Autonomous Mobile Robot with Quantum-Inspired Optimization Technology - Avoidance of Dynamic Obstacles in Crowded Environments,” Journal of the Robotics Society of Japan, (2025). https://www.rsj.or.jp/pub/jrsj/advpub/251225-07.html
- GPU: Graphic Processing Unit
- ASIC: Application Specific Integrated Circuit
- J. Luiten et al. “HOTA: A higher order metric for evaluating multi-object tracking,” Int. J. Comp. Vis. 129, 548–578 (2021). https://arxiv.org/abs/2009.07736
- A. Milan, L. Leal-Taixé, I. Reid, S. Roth, K. Schindler, “MOT16: a benchmark for multi-object tracking,” arXiv:1603.00831, (2016) [Online]. Available: https://doi.org/10.48550/arXiv.1603.00831
- L. Leal-Taixé et al., “MOT17-{02, 04, 05, 09, 10, 11, 13}-FRCNN,” Accessed: Sep. 17, 2024. [Online]. Available: https://motchallenge.net/data/MOT17/
Contact
Toshiba Corporation
media.relations@toshiba.co.jp
MIRISE Technologies Corporation
https://www.mirise-techs.com/contact/