
- Numerical prediction
- Operation plan
Scalable path planning technology for multi-agents
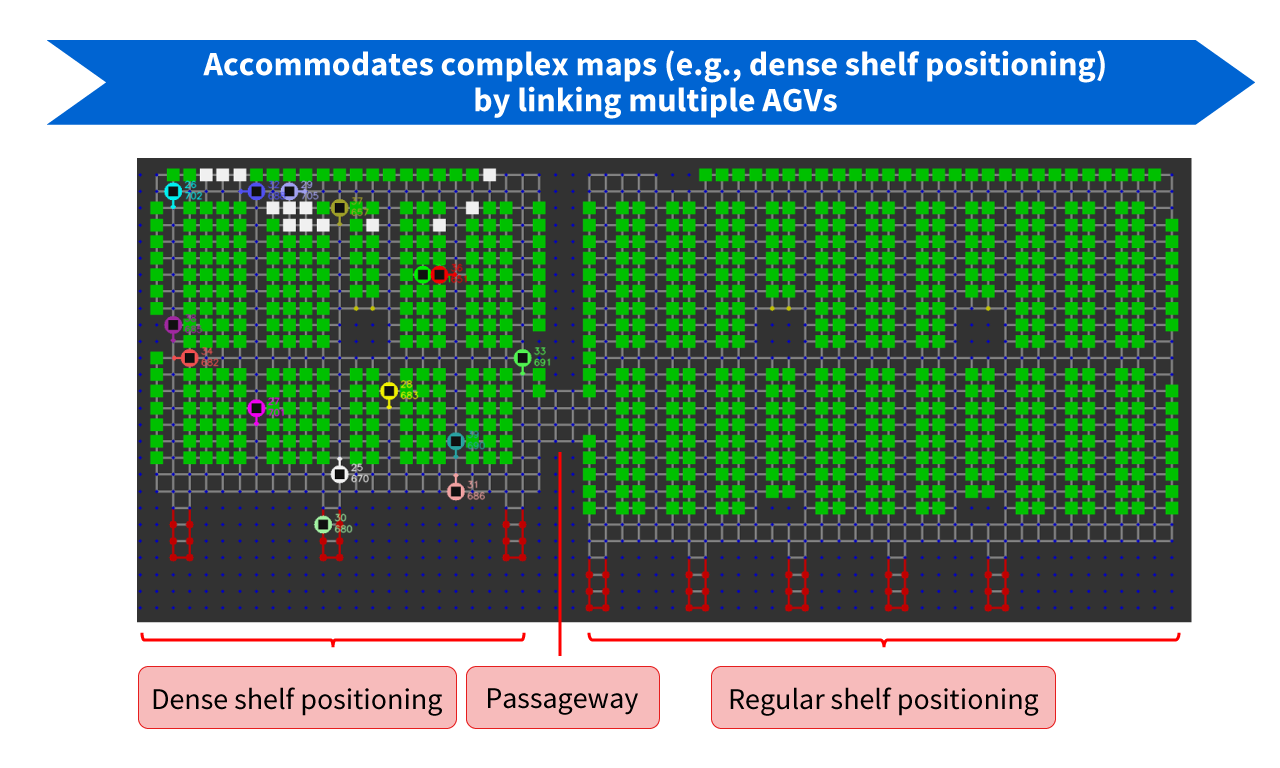
The system plans AGV paths on large-scale maps and in environments with densely arranged shelves.
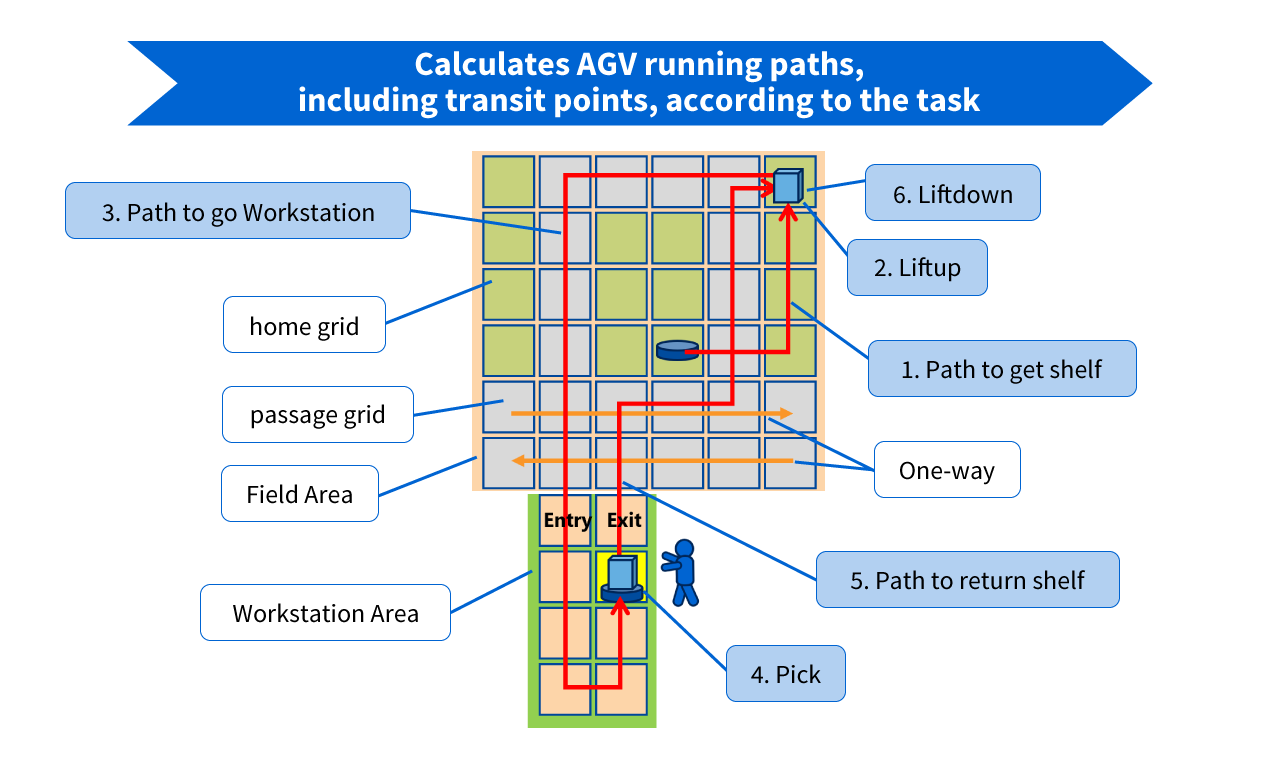
- Quickly plan collision-free paths for automated guided vehicles (AGVs) to pick up shelves, carrying them to workstations, and return them to their original positions.
- Even when shelves are densely positioned, the system plans the optimal paths by shifting outer shelves to retrieve inner shelves.
- All AGVs move one grid at a time toward the destination (or transit point). When path conflicts occur, AGVs yield to one another based on predefined priorities, and paths are then planned to the final destinations.
Applications
- Shelf transport AGV systems
Benchmarks, strengths, and track record
- Flexibility and high accuracy in diverse operating environments: Achieves highly accurate path quality while minimizing processing load using a method that plans AGV movement one grid at a time.
- High visibility for operational improvements: Hourly transport volumes and bottlenecks can be predicted by combining path planning technologies and simulations.
- Supports advanced transport scenarios and complex maps: Accommodates complex map configurations such as repositioned or densely arranged shelves that were difficult to handle with conventional methods.
Inquiries
Inquiries to Toshiba Corporate Laboratory (Komukai region)
Please include the title “Toshiba AI Technology Catalog: Scalable path planning technology for multi-agents” or the URL in the inquiry text.
Please note that because this technology is currently the subject of R&D activities, immediate responses to inquiries may not be possible.
References:
- Michio YAMASHITA, Kenichi SHIMOYAMA, and Masako KASHIWAGI, Optimization of Path Planning for Multiple AGVs in Large-Scale Warehouse Operations, The Society of Instrument and Control Engineers(SICE) System Integration Division(SI2025), 2025
