業界初、線路内に設備を追加せずに「自動化レベルGOA2.5」を長野電鉄と実現
~夜間走行で200m以上先の支障物を検知して停車まで検証~
2024年07月16日
東芝インフラシステムズ株式会社
当社は、業界で初めて注1線路内に設備を追加せず、「自動化レベルGOA2.5」注2に対応する自動運転システムの開発に成功しました。開発は長野電鉄株式会社(以下、長野電鉄)と共同で行い、2023年8月から2024年2月にかけて長野電鉄長野線の一部区間(都市部)にて本自動運転システムの実証試験を実施し、基本動作検証が完了しました。
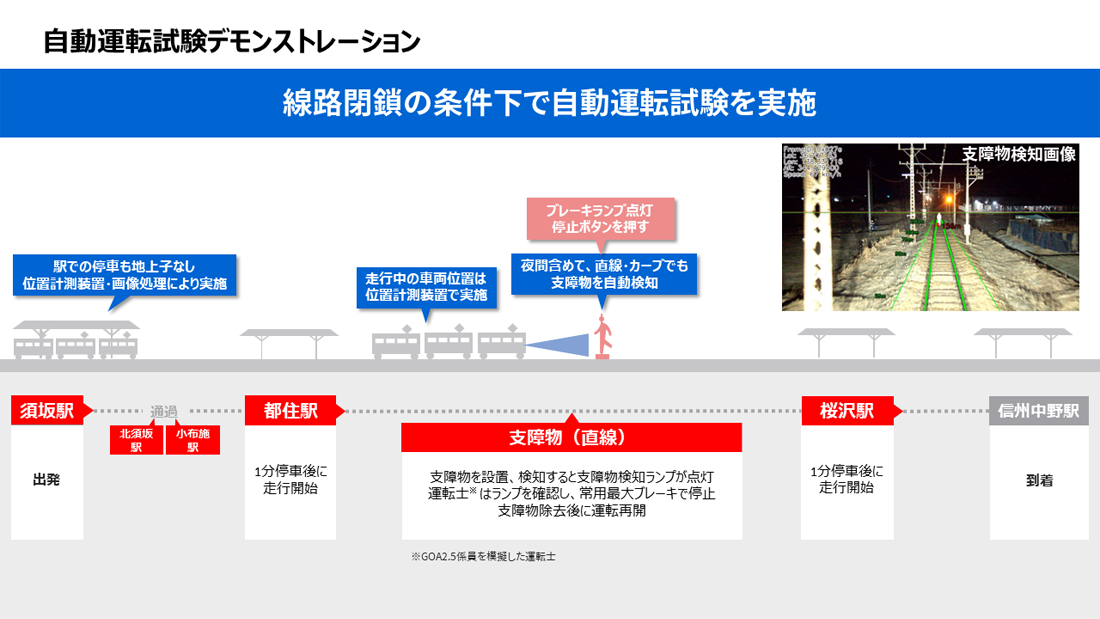
当社では、2021年度から長野電鉄と鉄道の運転免許(動力車操縦者運転免許)を持たない係員(GOA2.5係員)が先頭車両に乗務する「自動化レベルGOA2.5」に対応する自動運転システムの開発を進めてきました。今回の実証試験においては、夜間に線路閉鎖した条件下で自動運転試験を実施し±50cm以内の停止位置精度を確認しました。また、夜間70㎞/hでの走行時に前方の200m先の支障物を検知し、運転士の操作で支障物までに停車できることを確認しました。(夜間試験した列車においては、人間が通常視認できる距離は110~130m程度)
当社は、引き続き、長野電鉄での自動運転の本格的な運用に向けた開発に取り組むとともに、地方鉄道・ローカル線向け自動運転システムの開発を進め、「自動化レベルGOA2.5」に適合するシステムとして実用化を目指します。
自動運転システムの概要
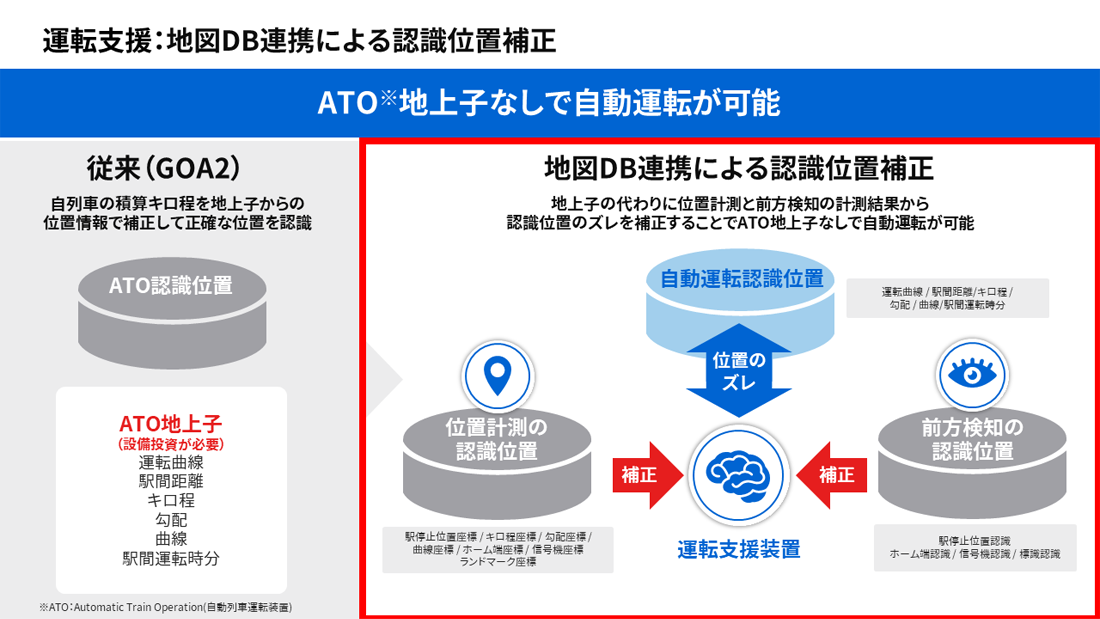
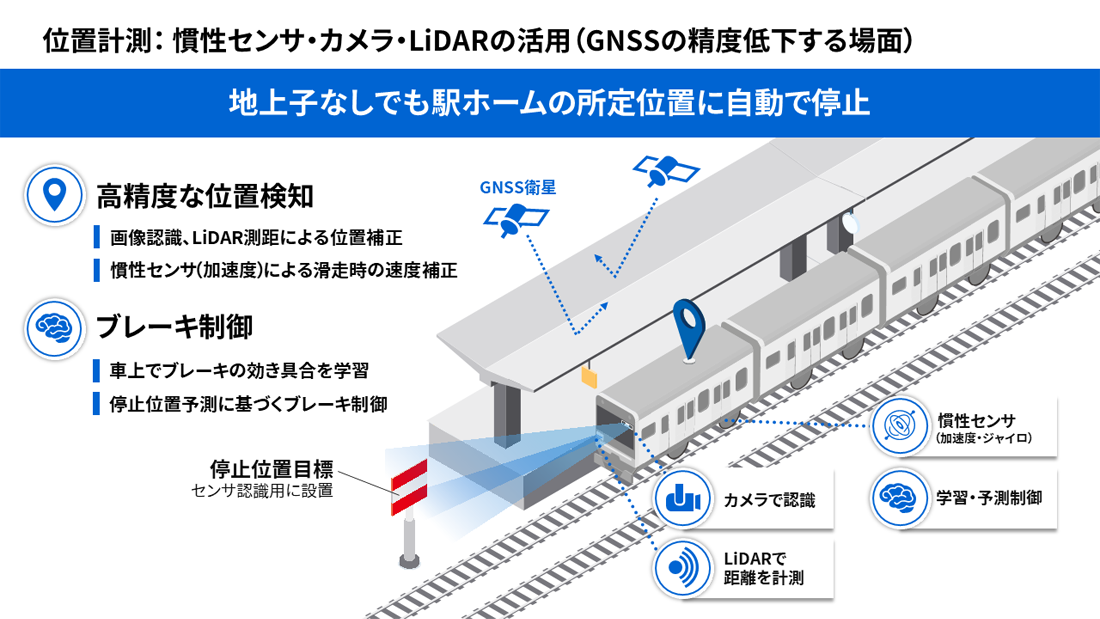
自動運転を実現するためには、車両の走行位置を正確に把握する必要があり、一般的には線路内に地上子注3を追加設置して正確な位置を把握する必要があります。地上子の設置・維持管理に係るコストへの懸念があることから、当社では、地上子の追加設置を必要としない自動運転システムを開発しました。この自動運転システムは、車両に設置した位置計測装置(GNSS注4とIMU注5を搭載)、前方検知用ステレオカメラ、LiDAR注6、画像処理及び運転支援装置で構成されています(図1参照)。画像処理及び運転支援装置はGNSSやIMU、速度計などにより自車位置を高精度に測定・推定し、その位置情報を用いて、線路地図データベースと照合し、加減速制御や停車制御を行います(図2参照)。
実証試験の概要
本実証試験の走行試験では、自動運転モード出発スイッチにより走行を開始し、位置や速度の情報をもとに、運転支援装置で加減速制御および停車駅での停車制御を行いました(図3, 図4参照)。また、前方検知用ステレオカメラで模擬支障物を検知してGOA2.5係員を模擬した運転士に通知し、手動で停車する試験を行いました。
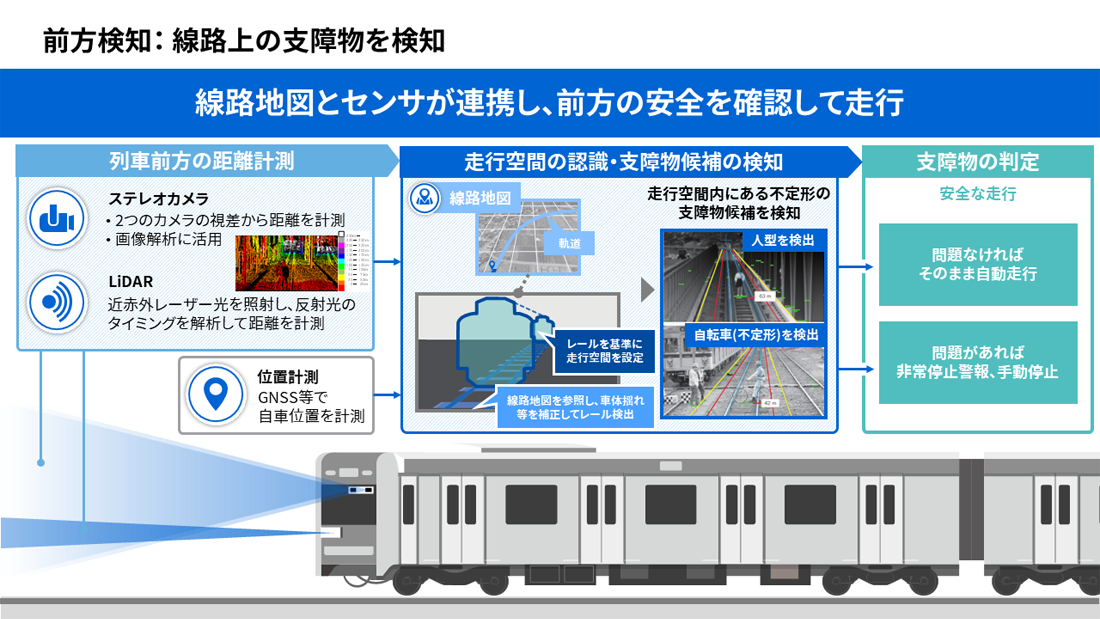
支障物検知について、当社の前方支障物検知システムでは、ステレオカメラにより線路上に支障物(線路内の障害物)があるとGOA2.5係員に音や光でブレーキ操作を促す機能を有しています。今般の実証試験で昼間・夜間ともに200m先の支障物を検知可能であることを確認しました(図5参照)。
さらには、搭載したカメラによる支障物検知性能を曲線区間においても確保するため、鉄道車両として初となる列車位置連動の視界確保対応のカーブ用補助灯をコイト電工株式会社と共同開発しました。これにより、夜間におけるカーブとその先の支障物検知の性能向上を図っています。
当社は、本実証試験を通して、カメラでの撮影が困難な逆光や対向照明等の環境条件のもとで、支障物検知に課題があることを確認しました。そのため当社では同様の条件下で300m先の支障物を安定して検知できるシステムの実現を目的とし、現在のカメラにLiDARを追加した前方検知システムを試作し検証しました。検証にあたり、株式会社東芝の研究開発センターで開発を進める、80点並列測距が可能な「長距離高解像測距技術」注7, 注8を搭載した試作LiDARを列車前方に仮設して、走行列車から300m先の物体の測距ができることを確認しました。
今後の展望
当社は、引き続き鉄道車両用の機器およびシステムの開発を進め、今後はステレオカメラの画像情報やLiDARの測距データを用いて、300m先の支障物検知を実現します。また、地形や天候の影響を考慮し列車位置に応じた最適なセンサを自動的に選択する技術を開発します。各装置を設置性に優れた最適な装置として開発を進め、自動運転の本格的な運用に向けて幅広い列車に適用可能なシステム開発に取り組みます。自動運転システムとしては将来的に、「自動化レベルGOA3」以上の自動運転への対応も目指すなど、安全性と利便性の追求に加え、個々の鉄道事業者のコンセプトに沿ったソリューションを提供してまいります。
なお、本実証・技術開発は国土交通省の「鉄道技術開発費補助金」注9を活用しています。
注1 線路内に位置補正用の地上子を設置せず、「自動化レベルGOA2.5」に対応する自動運転システムの開発・基本動作検証完了が初めて。
注2 「自動化レベルGOA2.5」は、列車の先頭に運転免許(動力車操縦者運転免許)を持たない係員が乗車し、緊急停止操作、避難誘導等を行う。
注3 地上子:ある地点で地上-車上間の伝送を行うために地上側に設ける装置。
注4 Global Navigation Satellite System:汎地球測位航法衛星システム
注5 Inertial Measurement Unit:慣性計測装置
注6 Light Detection and Ranging:レーザーの照射により、離れた物体までの距離情報を3D画像として得る技術。
注7 (株)東芝 研究開発センター 「研究開発ライブラリ レベル4以上の高度自動運転の実現に貢献するLiDAR向け受光技術を開発−小型化・低コスト化を実現するソリッドステート式において、従来の機械式と同レベルの200mの長距離測定を達成、柔軟なシステム構成で多様な車種への対応も容易に−」
https://www.global.toshiba/jp/technology/corporate/rdc/rd/topics/20/2007-01.html
注8 (株)東芝 研究開発センター 「自動運転システム向け長距離LiDARの回路技術を開発」
https://www.global.toshiba/jp/news/corporate/2018/03/pr0501.html
注9 2023年度 「列車前方検知等の鉄道自動運転に向けた要素技術の開発」