
AI Technology
車載向け画像認識プロセッサ「Visconti™4」を用いた自動運転システムを開発
2016年10月
概要
当社は、先進運転者支援システム(ADAS:Advanced Driver Assistant Systems)向け車載画像認識プロセッサVisconti™4(注1)と、新たに開発した障害物地図生成技術および軌道生成技術により実現した自動運転システムの実証実験を、9月26日から愛知県内の公道で開始しました。今後、本実証実験を通じて、実用的な自動運転技術の確立を目指します。
なお、本実証実験では、愛知県の自動走行実証推進事業を受託したアイサンテクノロジー株式会社の高精度三次元地図、名古屋大学客員准教授である加藤真平氏および株式会社ティアフォーの制御システムを使用しています。
開発の背景
自動運転では、車両に搭載されたカメラやLIDAR(注2)の情報から周囲の環境を認識し、適切な軌道を生成するなど、多くの演算を伴う処理が必要です。そのため、現在大学などで実証実験に用いられている自動運転車両では、ハイエンドPC(注3)で処理が行われています。自動運転機能の普及には、ハイエンドPCでの処理を、車載用プロセッサで代替することにより、価格や消費電力を抑えることが重要となります。
本技術の特徴
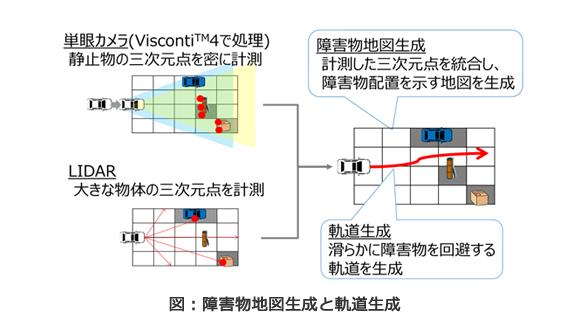
本システムでは、従来ハイエンドPCで行われることが一般的だった自動運転時の認識処理において、計算量の多いカメラ映像から三次元点群(注4)を計測する処理をVisconti™4で実行しています。更に、カメラとLIDARによる車両周辺の地図生成技術、障害物を避けて走行する軌道の自動生成技術を当社で独自に開発し、車載用プロセッサで処理可能な計算量で実現しています。当社は、これらの技術を、PC上で動作する名古屋大学の自動運転ソフトウェアに実装し、公道で自動運転の実証実験を開始しました。
今後の展望・予定・目標
当社は、今回の実証実験を通して、自動運転技術の基本構成「知覚・認識・判断・操作」のうち、実用的な認識機能と判断機能を2020年までに確立することを目指します。
(注1)https://toshiba.semicon-storage.com/jp/product/automotive/image-recognition.html(東芝デバイス&ストレージ株式会社)
(注2)Laser Imaging Detection and Ranging、レーザー照射に対する散乱光を測定し対象物までの距離を計測するセンサ
(注3)消費電力の大きい高性能GPU(Graphics Processing Unit)や高クロックのCPU(Central Processing Unit)を搭載している等、高位スペックのPC
(注4)二次元の画像における特徴点に、カメラから特徴点までの距離情報を付加して三次元化した点の集合