
衣斐:まずは、研究開発センターとは、どのような部門なのか教えてください。
山崎:研究開発センター(以下:RDC)は東芝の次世代の事業やサービスの核となる技術を研究開発する部門です。AIやIT、材料、デバイスなど様々な領域の研究者が日々、世の中にイノベーションを起こすべく活動しています。
衣斐:今回、
ーーー家電チームリーダーとしてプロジェクトを推進していく中でこだわったところとか印象に残ったエピソードがありましたら教えてください。
山崎:カットされそうなぐらいたくさんあります(笑)。参加の動機として、経営の問題が取り上げられがちな東芝が面白いことをやっているということを外に見せたかった。他にも内部では面白いことがたくさんあって、世の中を変えていく原動力になっているところを見せたかったですね。
こだわったところは、「単に勝つ」ではなく、「いかに面白く勝つか」を大事にしました。パン食い競争ということで、パンを食べに行く面白さが前面に出るように意識しました。また、初日の時点でメンバーからアイデアがどんどん出てきたので、どのようにふくらませて、どのようにまとめるかにこだわりました。
特にデザイナーである大西さん主催のブレストでは、たくさんのアイデアをイラスト共に書き出した後、「いかに面白く勝つか」に主眼を置き、まずは面白いかどうか、次に技術的な実現性の順でアイデアを選んでいきました。たくさんアイデアを出したところで、1.5か月の中で1つに絞るか、どれくらい広げるか・・・。最初から絞っても面白くないのでそれぞれのアイデアを「王道」と「覇道」に分けてみました。
衣斐:普段の仕事で「王道」や「覇道」なんて言葉は中々聞きませんが、
ーーー「王道」と「覇道」というアイデア名は、どこからでてきたのでしょうか?
山崎:色々なアイデアがある中で、「王道」、「覇道」といったネーミングがあるとメンバーがそれに呼応して動いてくれることを期待してつけてみました。縦横に走り回ってパンをしっかりとらえる確実性の高い案の「王道」と、釜がジャンプしたり、左右にアームを伸ばして一気にパンを食べるリスキーだけど面白い案の「覇道」です。最初は「覇道」ではなくて「邪道」にしようと思ったのですが(笑)、「邪道」だとやる気出ないかなと思って「覇道」にしました。
結果として、「王道」を選んだのですけど、王道と言いつつ、かなり難しい王道になりました。重たい釜を持ち上げてパンを食べるというコンセプトが難易度を上げていたのですが、その時は、デザイナーの示すこのコンセプトが当然のものと思っていて、「王道」として取り組んでいました(笑)。
衣斐:今まで我々が「王道」と呼んでいたものが実は「覇道」で、覇道と呼んでいたものが実は「超覇道」だったわけですね。
山崎:(笑)はい。実現に向けてメンバーの皆さんはアイデアをたくさん出してくれて、具体化する力も持っている。リーダーとしては最後に収束すべきところとタイミングを見極めていましたね。

山崎さん
衣斐:ありがとうございました。では次に、同じ研究開発センターの三友さんからお話を伺いたいと思います。三友さんといえば、まっすぐ走る裏ワザ、があったかと思います。
ーーーべいかりあすが、まっすぐ走る裏ワザについて教えてください。
三友:私、魔改造の夜のルールで、人が操縦するってきいて「エエッ」って思ったんですよ。人が操縦するって魔改造に関係ないものが入っちゃうじゃんって。やっぱりそこは技術の面で、1個ボタンを押したら勝手に進んで全部取るぐらいにしたいっていう話は結構していたんですね。
ただ、レギュレーションでやっぱりセンサーに制限があるというところで、何かないかと考えていたら、ロープが基準になるってことに気付いて。それで最初は、ロープを赤外線センサーで見ようとして、ちょこちょこ試したんですけど、3センチ位まで近づかないと駄目だねって。そしたら、狩野さんとかがToFセンサを持ってきて「これ使ってみてください」って。それでいろいろ試してみて、いけそうですねってなりました。
ただ、このToFセンサーが本来は5メートル見れるやつなんですが、ロープが細いので30センチ以上遠ざけると取りこぼしちゃうんですね。ロープに近づけるためにさすまたにつけようとすると干渉するということが分かって。高さで困っているんですって話をしていたら、渡邊さんがくるりん機構をすぐに作ってくれて。取り付けのとき、私が配線全然できないところを岡さんに助けてもらって。プログラムのところも、めっちゃブラッシュアップしていただいて。ホント、皆さんの知恵と汗の結晶であのToFができたんです。
衣斐:斜めに動く問題を、佐々木さんが解決されていたことも効いていたのでしょうか?
三友:そうですね。まだセンサーを取り付ける前ですが、ちゃんとまっすぐ走るというベースがあって、ToFがあって、ジャイロがあってというセンサーフュージョンです。
衣斐:そうだったんですね。終わった後もT大生の方とか集まって「何であんなにまっすぐ走るんですか」って聞いてきてましたよね。その時は、ちゃんと話しました?
三友:まってましたとばかりに(笑)。あれ嬉しかったですね。
衣斐:他にも、べいかりあすの機能について関わられたと思いますが、今回は
ーーーべいかりあすの「分身の術」の誕生秘話について教えてください。
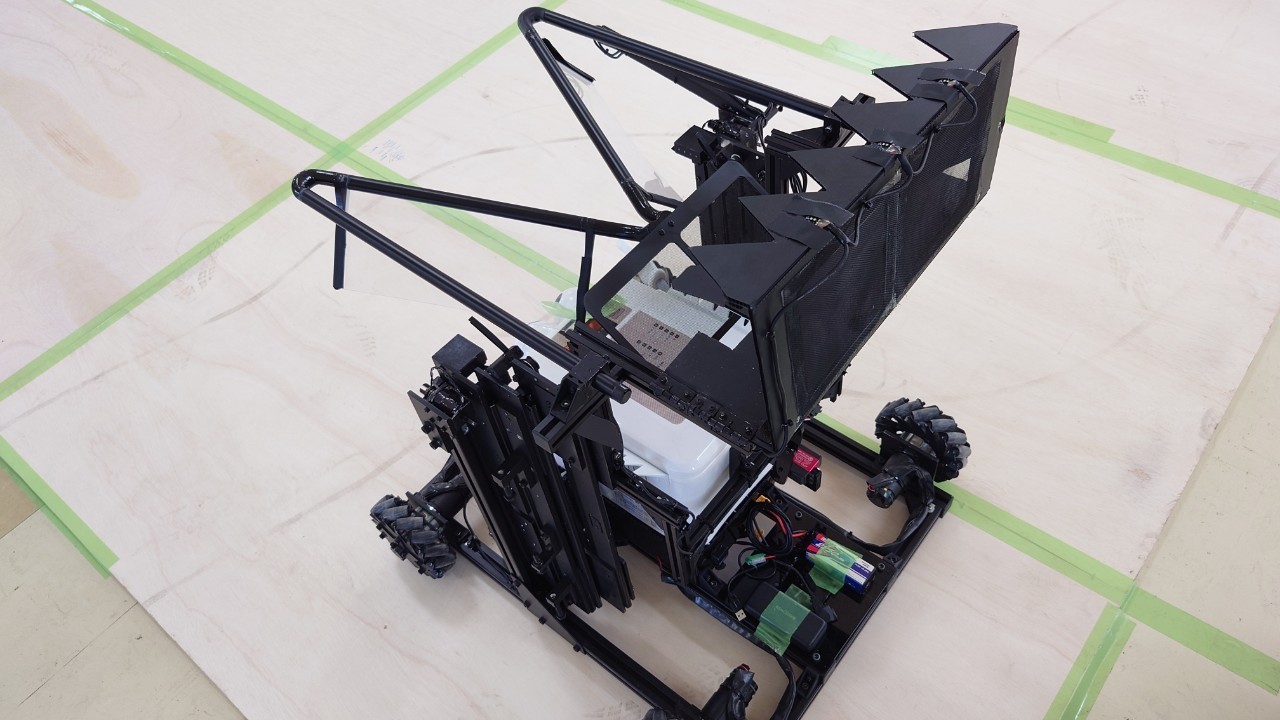
三友:釜だけ上げちゃうというアイデアは、みんなでブレストしている時に結構いい加減に「じゃあ側だけ上げれば魔改造っぽくてよくないですか?」っていう話をしたら、いいねいいねってなって。
渡邉:バラバラにして重さとかを測って、全部上げたら何gだけど、釜だけだったら何gみたいな話をして。中のモーター機構だけ下に残しちゃえば、だいぶ軽くなるよみたいに。そしたらこれくらいの力で上がるねって。
狩野:驚きましたね。筐体が全部バラバラの状態でおかれている。ここまでするんだっていう。
衣斐:確かに分解されているのを見て、これは戻せんのかな?パン焼くんだよね?って思った記憶があります(笑)
出浦:はい、分解したものを使って焼きました。黒く塗装した後の筐体で焼いたパンを本番でも使いました。塗装風味のパンにならないように空焚きもしたので、美味しく食べられます!
本田:釜の部分には、オートバイのエンジンとかにも使える、耐熱性のある塗料を使いました。

三友さん

分解された筐体の写真
黒塗りのTOFセンサー
衣斐:ありがとうございました。それでは、次は、研究開発センターの機器試作部の朝山さんからお話を伺いたいと思います。今回、機器試作部の皆さんに、加工や組み立てでたくさんご協力いただきました。普段どういった仕事をしているのか教えてください。
朝山:機器試作部では研究開発をモノづくりで支えるような仕事をしています。機械設計から機械加工、仕上げ、組み立て、構成、電機のソフト制作まで一貫してやって、皆さんのアイデアを形にするような仕事をしています。また、機器試作部というのは、研究開発センターのためだけのモノ作りではなく、全東芝の依頼を受けてモノづくりをする部門であるというのを、今回のプロジェクトでいろんな多くの人に知ってもらうこともできたと感じています。今回のプロジェクトで、東芝の技術力を世間に発信するお手伝いをできたかなと思っています。
衣斐:本当に、皆さん無茶ぶりしてましたよね。
ーーー機械加工に関して、一番印象に残っている無茶ぶりを教えてください。
朝山:分身の術のところですね。あそこは本当にバラバラにしたんです。側を持ち上げると窓があって、その下にインジケータや基板があるんですけど、それは下に置いておきたかったんです。配線をずっと引きずるわけにはいかなかったんで。出浦さんからスイッチ1個だけ押せればいいって聞いたので、その1個だけをベースの下の方に実はこっそり移植して。
出浦:他のボタンは押せなくても、あらかじめ設定しておけばパンが焼けるので、開始ボタン1個だけスイッチが押せればよかったんです。だから1個だけ、分離したときでも押せるように移植してほしいとお願いしました。
衣斐:ということは、分身の上についている本体側のボタンは全部、死んでたんですね?
出浦:はい。死んでました。
衣斐:じゃあ、もし途中でレギュレーションが変更になり、パンの焼き方が変わることになってしまったら・・・
出浦:レギュレーション違反になるところでした。(会場、笑い)
衣斐:危ない所でしたね。他にも2mに持ち上げるという無茶ぶりがあったかと思いますが、工夫したところを教えてください。
朝山:なるべく早く動く形に組み上げたかったので、結構現場で加工しながら組み立てるとかは多かったです。朝一番に来てたんですけど、朝見ると知らない形になっていることが多くて、俺の知ってるべいかりあすじゃなくて。チャットを見るとソレノイドが壊れたとかあって、ソレノイドは確かにバラバラになったりひん曲がっているんですけど、それだけじゃなくて。そういうところで皆さんの努力を知れたところでもあるんですけど。
衣斐:事件現場に残されたものから推理する感じが楽しめたわけですね
朝山:ソレノイドとかも壊れたあとすぐに改造して、強くして、補強してすぐ組み直して。一番、朝来てて驚いたのは真っ黒になってるときでしたね。(会場、爆笑)あれから本当に黒くしなきゃ怒られるみたいな。牧野さんがおっしゃっていたセンサー用の切り欠きを加工するときとかも、その場で現場でやったんですけど、切ったり穴開けたりする度に黒く塗りながらやりました。

朝山さん

分解されたスイッチ部分
衣斐:ありがとうございました。では、続いて、同じく研究開発センターの機器試作部の鎌田さんにお話を聞きたいと思います。
ーーーべいかりあす史上でも名高い、搬入日前日のエピソードを教えてください。
鎌田:搬入日の前日の朝から色々あったのですが、べいかりあす本体は良い感じに動いてパンを取れたので、後は練習するだけだと思ってくつろいでいたんですね。そうしていたら急にすごい音がして。本番直前に番組から渡されたパンを吊るすロープとサスマタの形状との相性が悪かったようで、サスマタが折れてしまったと騒ぎになっていました。それで、どうしようかとなった時、本田さんが「今から共創センターの3Dプリンタで出力すれば朝までにはできる」、大西さんが「予備を本社の3Dプリンタで作れます」と言ってくれて。パイプはまだ在庫があるみたいだったので、朝一で朝山さんに作ってもらうことにして。皆で分担して製作するということで、解散しました。そうして搬入日の朝、予備含めて3セット分の部材を持ち寄って集まったんですが、慌ててるので、変なミスとかしちゃって。端材と本体を接着剤で引っ付けちゃうとか。
本田:前日に、狩野さんからすごい接着剤があると聞いて、それを使ったから、全然取れないんですよ。
鎌田:最終的に、予備機として用意しようとしていた、最後の3個目だけ完成させることができて、それが本番機になりました。
衣斐:何が起こるか分からない状況だったからこそ、バックアップ機として、最初から3セット作ろうとしたのが良かったですね。
山崎:そこで終わりじゃなくて。取り付け終わったのが、搬入の締め切り時間の10分前くらいだったんですよね。ホント間に合うか!?みたいな感じでした。
衣斐:もちろん黒く塗るのもやったんですよね。
大西:自宅のベランダに塗装ブース作って、塗ってきました。
衣斐:もしかしたら一番濃密な時間の過ごし方でしたね。
山崎:京浜工場に会場を移動してから実質3日しかなかったんですけど、一か月くらいあった気がしますね。
渡邊:鎌田さんから途中経過がチャットで来るんですけど、実況中継みたいな感じで結構楽しかった。
三友:夜中にチャットしてもあっという間に既読が付くんですよ。みんな起きてんなって(笑)
本田:三友さんのZ機構の話もチャットで見てたんですけど最初はバッテリーの干渉から始まって、段々原因が絞られて、そういうのがチャットに入ってきて。完全に解決したときには感動しました。
衣斐:みんなリアルタイムで見てたんですね。COVID-19もあって、オンラインでのツールが発展してたから、スムーズにやり取りできたってのはありますよね。
鎌田:そのチャットの中で「バッテリーがべいかりあすに干渉する」って書かれていたのを見て、白い所はべいかりあすだけど、黒い所はべいかりあすじゃないんだって思いました。みんなが世界観に飲まれていましたね。「バッテリーがべいかりあすに干渉する」についてですが、チャットを見返すと 「べいかりあすが黒い部分と干渉している」の方がニュアンスが近かったです。
鎌田さん
衣斐:ありがとうございました。では次は、生産技術センターの岡さんにお話を伺っていきたいと思います。まずは、生産技術センターはどのような部門なのか教えてください。
岡:生産技術センター(以下、CMC)というのは研究所で、生産技術という名前の通り、モノづくりに関する技術の研究開発をしているところです。製品の検査装や構造解析、あとは現場の改善活動までさまざまな研究開発、提案活動をやっています。その中で私はロボットの技術を研究開発する部門に所属しています。
衣斐:今回、ラスト2週間くらいに、開発状況が芳しくなく、助っ人が必要だとなったときに、同じCMCから参加いただいた武田さんが、動いてくれて、岡さんを紹介してくれました。
ーーー途中から参加いただきましたが、空気になじめましたか?
岡:ロボットの制御技術をこれまでやってきたということで関われるんじゃないかということで、武田さんに誘っていただきまして、途中参加という形で参加させていただくことになりました。不安だったことは2つあって、一つはその本番の2週間前なんで、もう何かやることはないんじゃないかということですね。
衣斐:いっぱいありましたよね(笑)
岡:もう完成していて、あと動かすだけだみたいな状態だと思ってたんです。そしたら来た時に「あれ、べいかりあすどこにあるの?」みたいな。あったのはメカナム4輪が付いていたフレームだけで。あ、なるほど、ここから作り上げていくのだなというところで、もう何をやれば完成までとたどり着けるかなって、私なりに入れそうなところ、できそうなところっていうのを探すところから始まりました。もう一つはやっぱり途中参加だったので、最初からやってきたメンバーの方に受け入れてもらえるかという所がありました。その点は最初入る前は心配だったんですけども、参加してから全くそんなこと心配にならなくなって。皆さんがゴールを可視化していて、世界観が共有されているっていうところがあって、みんな同じ方向を向いてたんですよね。で、みんなが同じ流れに乗って進んでいくので、私もその流れに乗っていくだけ、すっと入っていくだけで、参加ができたっていうことがあって、受け入れるとか受け入れないとか、そういうレベルじゃなくて流れに乗るだけで良かった。それがすごく気楽というか、楽しく参加できたなっていうのがありますね。
衣斐:デザインの効果が非常に効いていますね。アイデアを残していく、可視化していくということは、ポスターとしてゴールイメージを示すことも、議論をホワイトボードに残していくことも、非常に有効でしたね。
本田:「あそこに行けばいいんだ!」っていうゴールがいつも見えてるのって大事ですね。
衣斐:岡さんが、主に担当された、
ーーージャイロセンサーを使った制御について詳しく教えてください。
岡:メカナムホイールって、前後左右移動、回転もできて、自由度が高い動きができますが、四輪全部モーターで動かさなければならないということで、まっすぐ進んだつもりでも、いつの間にか曲がってしまいます。9mもある広いフィールドだと、操作してる人がまっすぐ走らせていてもだんだん曲がってしまうっていうのが、操作に影響がでるだろうと思いました。その時に、角度が分かるジャイロセンサーを使って、モーターにフィードバックさせることで、まっすぐ走らせるという制御を入れたのは私のメインの活動でした。
それで制御をするときって、プログラムを書いて終わりではなくて、パラメーターの調整をしないといけないんですね。それを間違えるとより曲がっていってしまうということがおこってしまうので。本当だったら何度も試験走行して、パラメーターを決めるというのが普通なんです。今回の開発は短期で、操作者の練習時間も確保しなければいけないというがありました。なので試験走行に使える試走は1,2回という、製品開発で考えればかなり無理なスケジュールでした。でもそこは、私のこれまでロボットの制御をやって培った経験と勘を生かして、少ない走行試験で決めました。それで制御がバシッと決まってまっすぐ走った時は、一番興奮しました。
山崎:佐々木さんが左右の出力を同じにして真っ直ぐ進むようにしてくれた話がありましたが、それでも床が滑ったりして曲がっちゃうんですよ。そこを傾きのズレはジャイロで検知し、横にずれた分は三友さんのToFセンサーが戻してくれる。
岡:複数のセンシング技術を集約したセンサーフュージョンです。
衣斐:なるほどなるほど。凄い技術が使われていますね。これは見た目では分からないので、放送の中では分からないですよね。
岡:見た目には絶対わかんないんですけど、T大の学生さんが気付いてくれてました。
衣斐:採用活動にもつながったかもしれませんね。T大の皆さんもT芝に来てくれると嬉しいですね。

岡さん
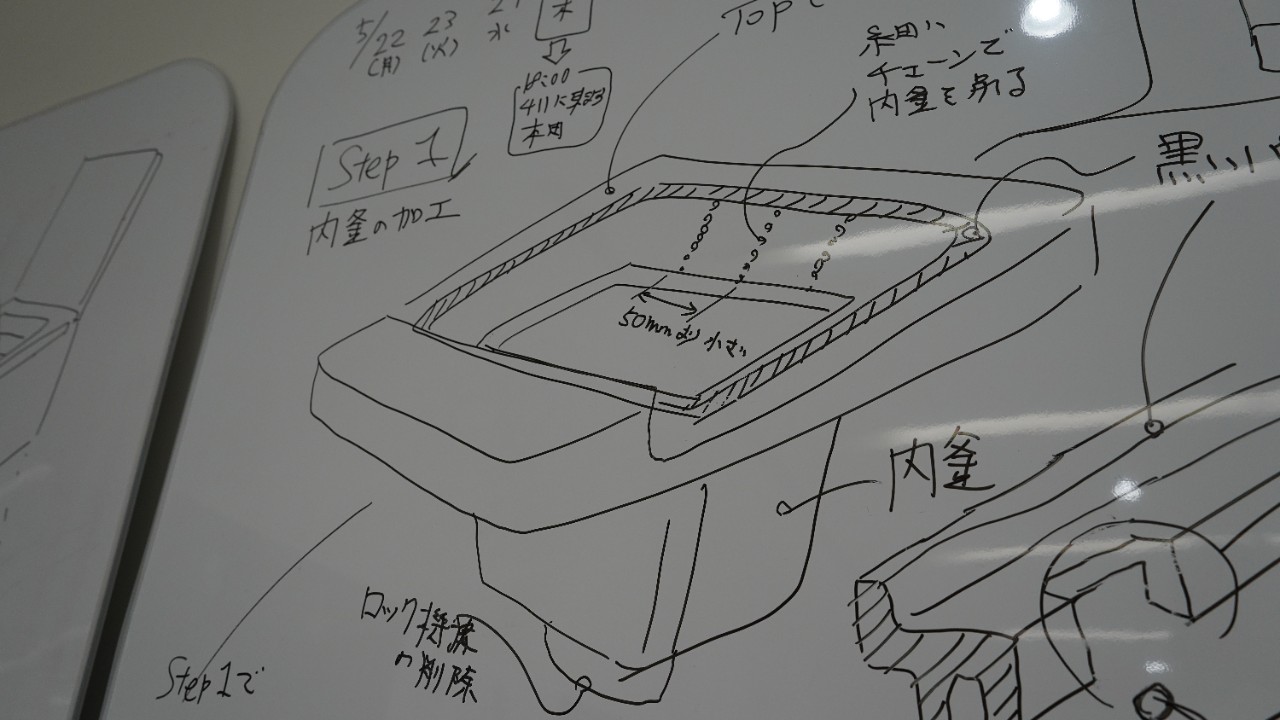
ホワイトボード上の議論