生産技術センター

生産技術トピックス
2023年
物流センターにおけるピッキングの移動距離を適正化する商品配置に関する論文がAPIEMS 2023で 「Outstanding Paper Award」を受賞
公開日 2023年12月18日
- 生産エンジニアリング技術
本賞は、APIEMS(Asia Pacific Industrial Engineering and Management System)が主催する APIEMS 2023において、物流倉庫での商品の保管場所の割当て問題の解法を提案した優れた論文として認められ、受賞しました。受賞者は当社の田中貴、杉山尚美と共同研究先の上智大学の山下昇平さん、伊呂原隆教授です。授賞式は2023年10月に開催されました。以下に研究の概要を紹介します。
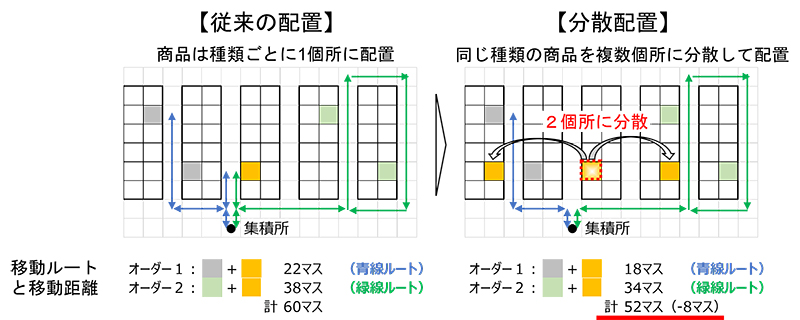
物流倉庫では商品の入荷から保管・ピッキング(倉庫内にある保管商品の中から指示にそって商品を集める)・梱包・出荷の業務があり、業務全体の50%を占めるピッキング、特に作業者の移動距離を減らすことが課題の1つです。移動距離の削減には同じ商品を複数箇所に分散して配置することが有効であると考え、商品の出庫頻度に応じた配置とピッキング時の移動経路を同時に考慮して総移動距離を適正化する近似解法を提案しました。本解法はSimulated Annealing法をベースとしたヒューリスティックモデルで、数理最適化ソフトでは実行可能解が得られない規模のデータでも解を得ることができます。また、商品の出庫頻度だけでなく商品がどれだけ同時に注文されるかが総移動距離の削減に大きく影響していることを示しました。
今後は、得られた解の分析を踏まえてモデルの改善を図っていきます。
関連部門
- なし
掲載誌等
- -
令和5年度 神奈川県技能者等表彰 優秀技能者/青年優秀技能者を受賞
公開日 2023年11月28日
- メカトロニクス技術
本賞は、神奈川県知事が優れた技術・技能を持つ県内の技能者に対して行う表彰で、県内の産業発展や人材育成に貢献する技能者を称えるとともに、若い世代にも技術・技能の重要性や魅力を伝えることを目的としています。被表彰者は当社の荒巻正一郎と上野優斗です。授賞式は令和5年11月に開催されました。荒巻はマルチ技能者の先駆者として、様々な自動化装置の開発に携わる中で、卓越した加工技能と知識を十二分に発揮し、開発設備、生産設備、高精度部品の具現化とモノづくりにおける問題解決を推進し、また若手技能者の指導育成に努めていることが評価され、機械製図工として「優秀技能者」を受賞しました。上野は、電気機械組立部品工として優れた技能を有するとともに、旋盤作業、機械検査作業など幅広く技能を習得することに積極的に取り組み、また担当する作業工程の品質・安全維持向上活動や後輩技能者への指導など、何事にも積極的に取り組んでいる姿勢が評価され、「青年優秀技能者」を受賞しました。
今後も引き続き、技能者としての研鑚に努めていきます。

自律搬送ロボットを活用した耐圧・絶縁自動試験システムの開発で
2023年度(第72回)電機工業技術功績者表彰優秀賞(ものづくり部門)を受賞
公開日 2023年11月2日
- 知能化ロボット技術
本賞は、一般社団法人日本電機工業会が主催する「功労者表彰」であり、重電部門、家電部門、ものづくり部門、IoT・AI・DX部門の各分野において、「新製品・新技術開発などによって優れた成果を挙げ、電機工業の進歩発達に貢献した方々を表彰する」ものです。当社は、開発した自律搬送ロボットと試験機能を持つ双腕ロボットを活用したシステムの進歩性が認められ、「ものづくり部門」で受賞しました。受賞者は当社の寺田明人、貞本敦史、東芝インフラシステムズ株式会社の竹村幸司の3名で、2023年10月11日に表彰式が行われました。以下に受賞した技術の概要を紹介します。
国内の製造現場では、労働者が不足しており、省人化と作業環境の改善が求められています。当社の製造現場でも耐圧・絶縁試験のような危険を伴う作業が存在し、危険作業を隔離し、低コストで自動化する必要がありました。
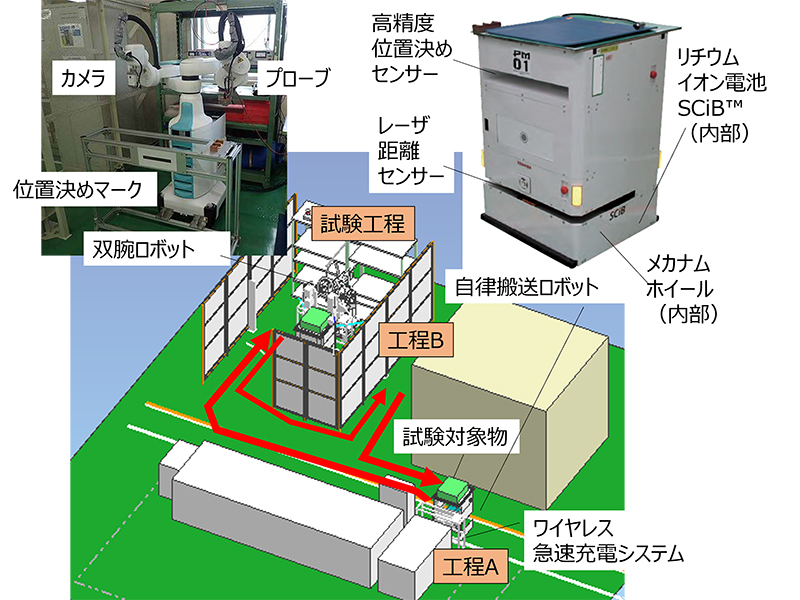
今回開発したシステムは、試験工程を安全柵で囲み、自律搬送ロボットで試験対象物を運びます。柵内では、双腕ロボットが耐圧・絶縁試験を行うことにより、危険作業を作業者から隔離しました。また、作業者との衝突が回避できるため、人と共存可能で、高精度に位置決めが可能な自律搬送ロボットにより、既存ライン上に新たなスペースを設けることなくシステムを構築し、投資コストを計画より25%抑制しました。
今後、様々なロボットシステムへの展開を図り、製造現場の自動化推進に貢献していきます。
個別受注製品の製造現場において工程の進捗を見える化するシステムの開発で
2023年度(第72回)電機工業技術功績者表彰奨励賞(IoT・AI・DX部門)を受賞
公開日 2023年11月2日
- メカトロニクス技術
本賞は、一般社団法人日本電機工業会が主催する「功労者表彰」であり、重電部門、家電部門、ものづくり部門、IoT・AI・DX部門の各分野において、「新製品・新技術開発などによって優れた成果を挙げ、電機工業の進歩発達に貢献した方々を表彰する」ものです。当社は、工程進捗を部品単位で見える化する技術の先進性や、工程管理への貢献度が高く評価され、「IoT・AI・DX部門」で受賞しました。受賞者は、当社の岡本浩典、瀧利和、渕上康徳の3名で、2023年10月11日に表彰式が行われました。以下に受賞した技術の概要を紹介します。
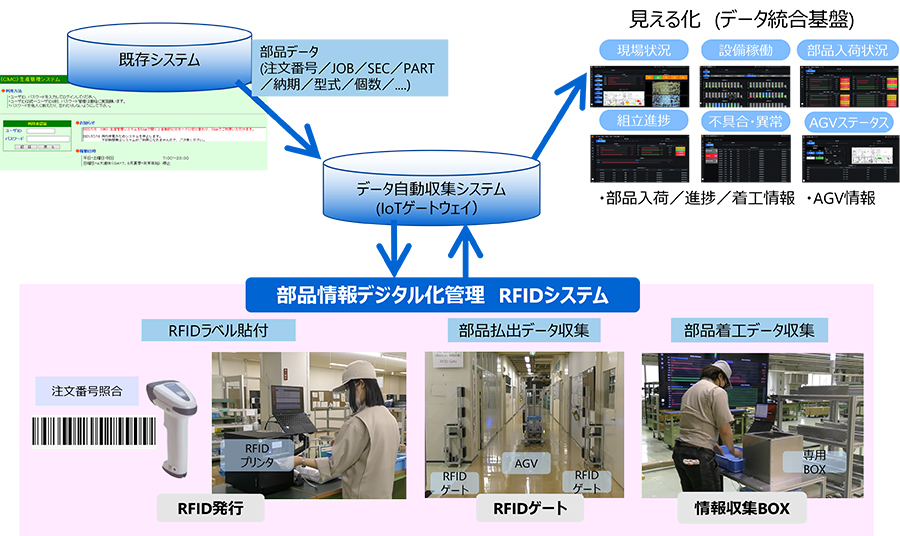
個別受注製品の製造現場では、使用部品や組立工程が製品ごとに異なるため、進捗状況の正確な把握が難しいとされてきました。数千点にもおよぶ部品の所在や、組立作業などの進捗状況は、作業者からの報告に頼るため、情報のばらつきやリアルタイムでの共有が困難で、作業負荷の偏りや作業遅延が生じる要因になっていました。
そこで、製造現場の各工程における部品情報をデジタル化して自動収集することで、部品の入荷、払出し、着工の状況を詳細かつ迅速に把握するシステムを開発しました。具体的には、部品の入荷時にRFID(Radio Frequency IDentification)ラベルを貼付け、製造現場の各所に備えたリーダーを用いて、部品の所在や進捗状況などの情報を自動収集し、見える化しました。これにより、作業報告や情報登録などの付帯作業削減に加え、進捗のリアルタイムな共有により、作業負荷の適正化や作業遅延への対策が適切かつ迅速におこなえるようになり、スループットが向上しました。
今後、様々な個別受注製品の製造現場で広く活用され、工程管理へ貢献することが期待されます。
音声認識を活用した手順型音声アシストシステムの運用を開始
公開日 2023年11月2日
- 生産エンジニアリング技術
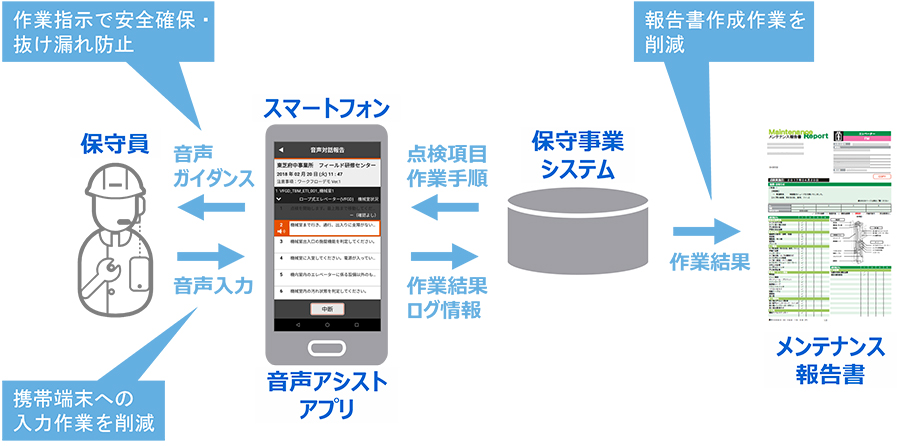
東芝エレベータ株式会社は、昇降機の定期点検作業時に、安全な作業手順を音声でガイダンスし、保守員の発話を音声認識して点検結果を記録する手順型音声アシストシステムの運用を開始しました。
本システムは、当社で長年培われた音声合成技術及び音声認識技術を活用し、東芝エレベータ株式会社と共同で開発しました。保守員が携帯しているスマートフォンを使って当日の点検内容を作業手順に沿って音声でガイダンスし、保守員はガイダンスに従って定期点検を実施し、点検結果を音声でスマートフォンに記録します。機種・仕様、点検月により異なる点検項目を具体的な作業手順に変換してガイダンスするとともに、点検結果は保守事業システムにアップロードされ、保守事業システムにより客先に提出するメンテナンス報告書が自動で作成されます。安全注意喚起の音声ガイダンスを織り込み、電圧・寸法などの測定結果を復唱・確認する機能、音声制御コマンド機能などを用いることで、ハンズフリーでの作業が可能となり、安全作業の順守、点検品質のさらなる向上、点検作業の効率化に貢献します。また、点検項目に対する音声ガイダンスは複数のパターンを用意できるため、詳細ガイダンスにより若年層向けのトレーニングにも活用できます。
今後も、当社技術を活用し、保守点検作業の安全・品質・効率向上に貢献していきます。
ロボットアームの動力学モデリングと同定、高速・高精度制御技術で
日本ロボット学会のフェローに認定
公開日 2023年11月2日
- 知能化ロボット技術
本認定のフェローは、日本ロボット学会の管掌する学術技術分野の発展に顕著な貢献をした正会員に対し授与される称号です。長年に渡るロボットの動力学モデリングや制御技術に関する研究活動、ならびに学会運営への貢献が認められ、フェロー認定につながりました。被認定者は、当社の大明準治で、2023年9月13日開催の第41回 日本ロボット学会学術講演会表彰式にて、フェロー証が授与されました。以下に技術の概要を紹介します。
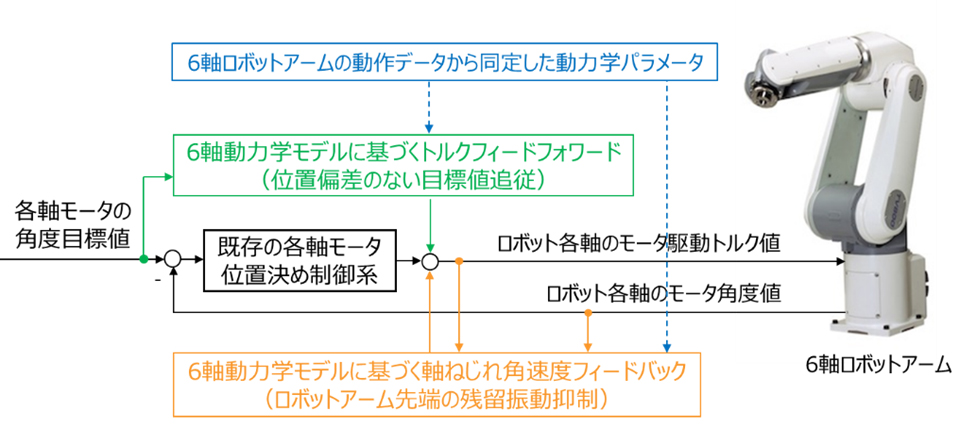
近年の組立や検査、物流の現場では、労働力不足を補うために、6軸ロボットアームを用いた自動化が進められています。生産性向上のためには、ロボットアームに高速・高精度な位置決め動作が要求されます。しかし、ロボットアームの各軸に内蔵された減速機のねじれ剛性が低く、アーム先端に発生する残留振動が課題でした。そこで、振動抑制のために、減速機のねじれ角を推定できる6軸動力学モデルに基づく制御系を構築し、高速・高精度な位置決め動作を可能にしました。動力学モデルに必要な慣性や摩擦、バネ定数といったパラメータについても、短時間の動作データから精度良く同定する方法を開発しました。
今後も、労働力不足解消の切り札であるロボット・自動化推進に制御技術で貢献していく所存です。
BAA実装基板搭載のマルチ電子ビームマスク描画装置MBM-2000PLUSが半導体・オブ・ザ・イヤー2023半導体製造装置部門でグランプリを受賞
公開日 2023年7月27日
- 実装技術
本賞は、電子デバイス産業新聞が主催する半導体・オブ・ザ・イヤー2023において、「製品・技術に対し、開発の斬新性、量産体制の構築、社会に与えたインパクト、将来性などを基準に記者投票で選出され表彰する」ものです。この度、当該製品の半導体向けフォトマスクの高精度描画の実現が認められ、受賞につながりました。被表彰者は株式会社ニューフレアテクノロジーです。授賞式は5月31日に開催されました。以下に技術の概要と生産技術センターの関わりについて紹介します。
本製品は、25万本の電子ビームを制御するMEMSチップBAA(Blanking Aperture Array)を搭載することで、3nm+デザインルールのフォトマスクにおいて、位置精度1.3nm(3σ)、寸法精度0.65nm(3σ)という高精度描画を実現しました。生産技術センターでは、本製品のキー部品となるBAAを搭載する基板のリフローはんだプロセスを確立しました。具体的には、はんだ実装時に生じる間接材料による汚染の対策、高耐熱材料の位置ずれを対策したプロセスを構築して適用しました。
今後は、基板製造オペレーションのQCDを技術面でサポートしていきます。
ご参考: 株式会社ニューフレアテクノロジーのニュースリリースにも掲載されています。
「半導体・オブ・ザ・イヤー2023」半導体製造装置部門でグランプリを受賞
スマートファクトリー化技術で第52回「日本IE 文献賞」を受賞
公開日 2023年7月27日
- 生産エンジニアリング技術
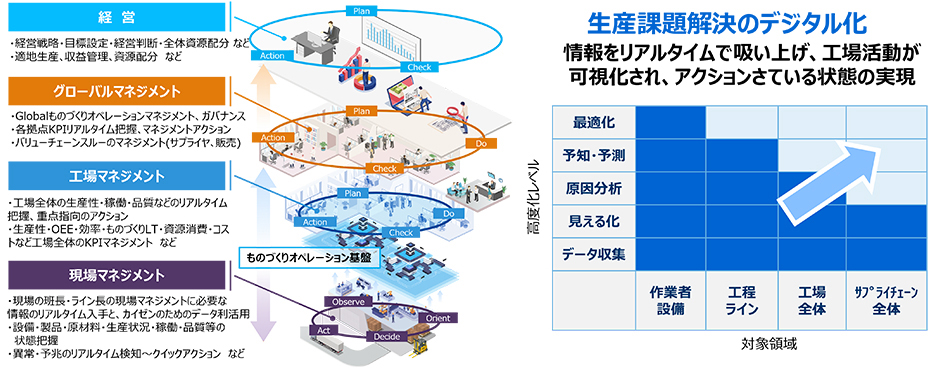
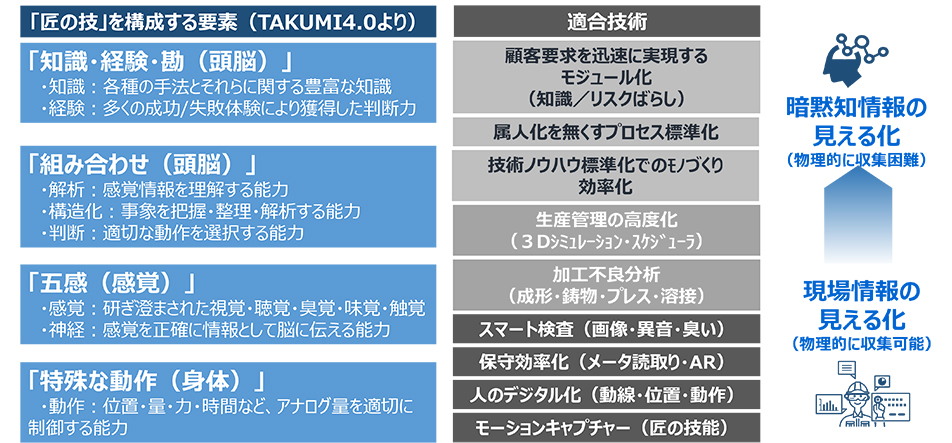
本賞 は、日本インダストリアル・エンジニアリング協会(日本IE協会)において、協会誌「IEレビュー」に掲載された文献よりIEの進歩発展に著しく貢献すると認められる文献を表彰するものです。「人(匠の技、知)とデジタル技術をつなぐIoP」の取組み内容が認められて、受賞に繋がりました。被表彰者は当社の髙納政敏、蚊戸健浩です。授賞式は2023年7月26日に開催されました。 以下に技術の概要を紹介します。
日本の製造業では、「熟練技術者の減少」や「少子高齢化による人手不足」、「属人的な製造プロセス」が共通課題となっています。その課題解決のために東芝では、スマートファクトリー化を推進しており、人・モノ・設備などの4M(Man、Machine、Material、Method)情報をデジタルでつなぐことで、全体最適とオペレーションの効率化を進めています。この4Mに関する「データ収集」、「見える化」、「分析」、「活用」を推進していくためには、IEの視点が必要となり、どのようなデータを、どのような粒度で収集するかが成功のカギとなります。特に人に関するデータ収集が課題となりますが、東芝では、人の持つ「匠の技・知」に着目し、暗黙知をデジタル化する技術の開発と活用を進めています。対象は、歩行や単調な作業だけでなく、熟練ノウハウやスキルが必要な「匠の技」、また意思決定や判断の根拠となる「匠の知」といった様々な情報を収集し、最適化する技術開発を行い、社内で展開しており、その事例を紹介しました。
今後も引き続きIoPに関する開発を進めていき、日本の製造業における課題解決を目指していきます。
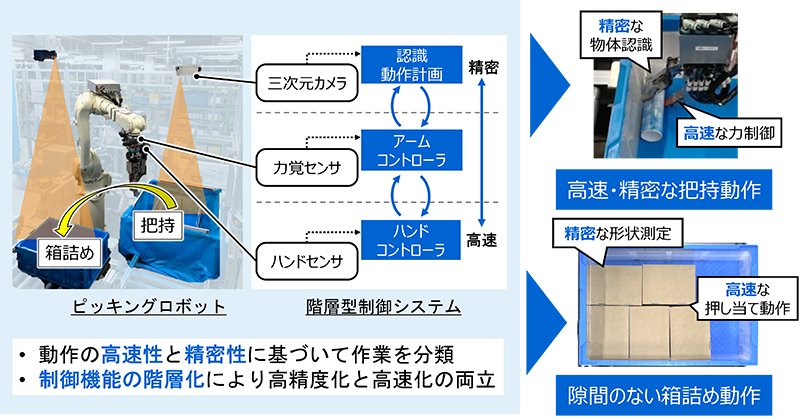
ピッキングロボットの動作制御技術で2022年度日本機械学会奨励賞(技術)を受賞
公開日 2023年7月7日
- 知能化ロボット技術
本賞は、一般社団法人日本機械学会において、「機械工業または広く産業社会に関わる主として技術上の業績をあげた個人を表彰する」ものです。物流業務を自動化するピッキングロボットの制御技術開発が評価され、今回の受賞につながりました。被表彰者は当社の岡佳史で、授賞式は2023年4月20日に実施されました。以下に技術の概要を紹介します。
人手不足が問題の物流現場を省力化するため、東芝では人手でのピッキング作業を自動化するピッキングロボットを開発しています。省力化に向けては、様々な形状や置かれ方の物品を人よりも高速かつ精密に処理することが必要です。そこでロボットの各作業を、求められる高速性と精密性に基づいて階層型に分類し、各階層に適切な制御機能を分配する制御技術を開発しました。この技術により、例えば物体の形状を三次元カメラで精密に計測し、見えない部分を力覚センサによる力制御で補完しながら高速に把持する動作や、物体の接触状態を制御し、隙間なく配置して輸送効率を向上する箱詰め動作を実現しました。
今後、動作精度を向上する技術の開発や様々なロボットシステムへの展開により、物流現場や製造現場の自動化推進に貢献していきます。
空調機向けオープン巻線モータ駆動用デュアルインバータの開発で第79回電気学術振興賞 進歩賞を受賞
公開日 2023年7月7日
- 制御技術
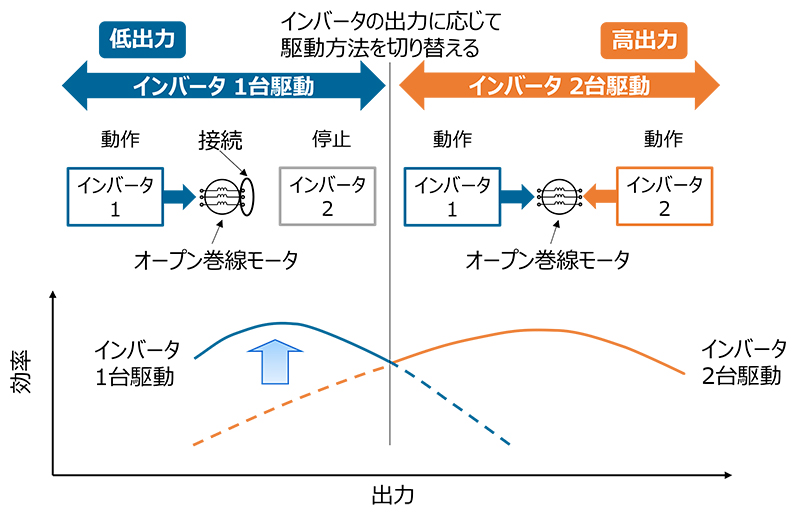
本賞は、一般社団法人電気学会が、電気に関する学術・技術において新規な概念・理論・システム・方式等を新たに提案、実証した者を表彰する賞です。東芝キヤリア株式会社と当社が連携して開発した空調機向けオープン巻線モータ駆動用デュアルインバータにより、大容量モータ駆動システムの高効率・小型・低コスト化を実現し、2020年10月よりビル用空調機「スーパーマルチuシリーズ」で空調分野において初めて実用化された成果が認められ、受賞につながりました。被表彰者は東芝キヤリア株式会社の清水慎也らの2名、および当社の柴山武至で、授賞式は2023年5月に開催されました。
近年、カーボンニュートラルの実現に向けて、モータ駆動システムの高効率化が求められています。空調機では、室外機1台当たりの大容量化も求められており、それに伴うモータ駆動システムの大型化や高コストが問題でした。これに対し、1台の大容量モータを2台の小容量インバータで駆動するオープン巻線モータ駆動用デュアルインバータを開発しました。速度・負荷(出力)に応じてインバータの駆動方法を切り替えることで、インバータ1台駆動により低速・低負荷時の大幅な高効率化と、インバータ2台駆動により高速・高負荷時の運転範囲拡大を実現すると共に、小型・低コスト化も実現しました。
本技術は、大容量モータ駆動システムの高効率・小型・低コスト化に有効で、今後、持続可能な社会の実現に向けて様々な製品への展開を図っていきます。
ご参考: 東芝キヤリア株式会社のニュースリリースにも掲載されています。
省エネインバータ技術で第 79 回電気学術振興賞 進歩賞を受賞
画像処理メータ読み取り技術の開発で
IIP2022 情報・知能・精密機器部門 ベストプレゼンテーション表彰を受賞
公開日 2023年3月27日
- メカトロニクス技術
本賞は、一般社団法人日本機械学会 情報・知能・精密機器部門が主催するIIP2022情報・知能・精密機器部門講演会において、「聴衆が理解しやすくかつ聴衆へのアピールが特に顕著に認められたプレゼンテーションを行ったものを表彰する」ものです。2022年3月に開催された本講演会での、当社のメータ読み取り技術に関する発表に対して今回受賞が決定いたしました。被表彰者は当社の瀧利和です。授賞式は2023年3月6日に行われました。以下に技術の概要を紹介します。
日本のインフラ設備の多くは高度成長期以降に整備されており、老朽設備の割合は今後加速度的に増加していくと予測されています。これら老朽設備を活用していくには、IoT化とデータ解析によって、耐用年数の適正化や、突発的な異常を防止することが必要です。しかし、老朽設備にはネットワークへの情報出力機能を持たない、多様な種類の計器が存在するという課題があります。
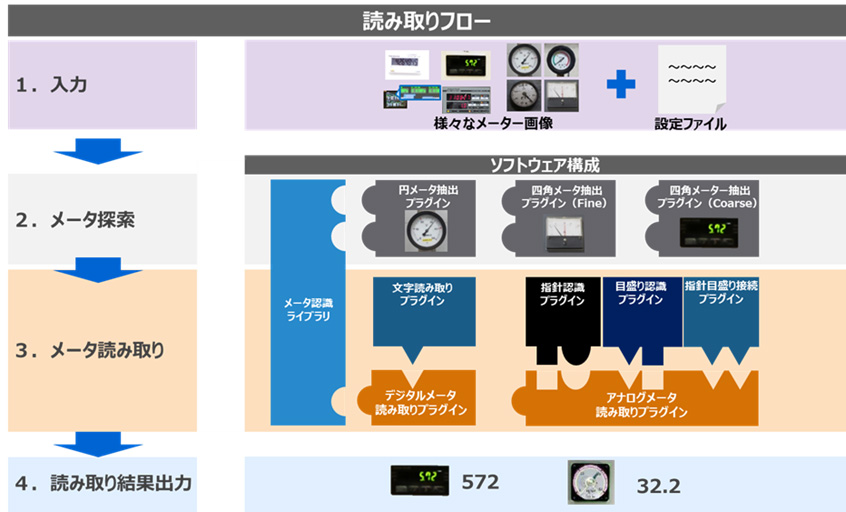
そこで、所望の機能を追加可能なプラグイン方式によるカメラ画像を用いたメータ読み取り技術を開発しました。同技術はメータ位置を自動検出し、デジタルメータであれば、メータに表示されている数値をデータ化し、アナログメータであれば、指針と目盛り領域を検出した後、更に指針と目盛りとの相対位置から、指している数値をデジタルデータに変換・収集する技術です。
当社のメータ読み取り技術はドローンやAGVなどの移動体からの認識に強みがあります。メータを「見つける機能」と「読む機能」にソフトウエア構成を分け、さらに「読む機能」もデジタルメータとアナログメータの両方に対応できるようにプラグイン方式にしました。その一例として、アナログメータでは、「指針を読む機能」、「目盛りを読む機能」、「指針と目盛り情報を統合する機能」に分けました。これにより、新たな形状のメータを読み取る必要が生じた場合でも、開発するのは最小限のプラグインだけで済みます。今後、プラグインの拡充や本技術の読み取り精度向上を図り、既存設備のIoT化に貢献していきます。
掲載誌等
【特報】
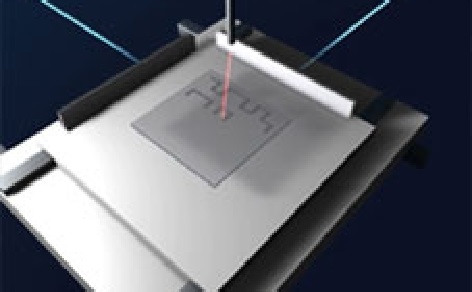
超電導磁石の3次元自動巻線技術で第69回(令和4年度)大河内記念技術賞を受賞
公開日 2023年3月16日
- メカトロニクス技術
本賞は、公益財団法人大河内記念会において、生産工学や生産技術分野の研究に関する学術の進歩と産業の発展に大きく貢献した業績を表彰する権威ある賞です。東芝エネルギーシステムズ社が当社と連携して開発した3次元自動巻線技術により重粒子線がん治療用超伝導小型回転ガントリーの実現、および単結晶引上げ用超電導磁石の低コスト化を実現した成果が認められ、受賞につながりました。被表彰者は、東芝エネルギーシステムズ株式会社の折笠朝文らの4名、および当社の林家佑で、授賞式は2023年3月に予定されています。
超電導磁石は先端基礎研究から産業・医療応用まで広く使われていますが、応用範囲の更なる拡大に伴い、従来のコイル巻線技術では実現できない複雑で精密な磁場分布を形成可能な超電導コイルの必要性が増しています。今回、当社が保有している自動化技術およびコイル巻線技術により、数千本の超電導線で構成される3次元コイルの曲面上における空間配置データを作成し、それに従って位置制御される6軸同時巻線機に搭載された超電導線溶着ヘッドにより対象コイル面に超電導線を配置できる自動機を開発し、誤差0.1%以下の磁場分布を実現しました。
今後、多様な3次元形状コイルへの展開が期待され、次世代がん治療装置の開発を進めるなど、更なる学術的・経済的貢献が期待されます。
技術の概要は東芝エネルギーシステムズ社の記事をご覧ください。
・2023年3月20日発行の電気新聞 産業・技術面に掲載されました。
深層学習を用いた製品状態の推定に基づく作業進捗の自動抽出手法で
日本機械学会 生産システム部門研究発表講演会2022 優秀講演論文表彰を受賞
公開日 2023年3月16日
- 生産エンジニアリング技術
本賞は、日本機械学会において、「生産システム分野の進展に大きく寄与する研究を表彰する」ものです。深層学習を用いて作業進捗を自動で抽出する当社技術の有効性が認められ、受賞につながりました。被表彰者は、当社の大島宏友、白川悠太、吉井崇哲、蚊戸健浩、浪岡保男と、大阪大学の前川卓也准教授の6名で、授賞式は2023年3月6日に行われました。以下に技術の概要を紹介します。
モノづくりの現場では、作業者や装置の加工進捗を継続的に把握し、計画に対する遅れの原因解明と改善施策により生産性を向上させています。しかし、人手による作業が中心の組立工程においては、現場の状況を目視で観察することにより作業進捗を把握しており、作業効率や人員確保の点で大きな課題となっています。
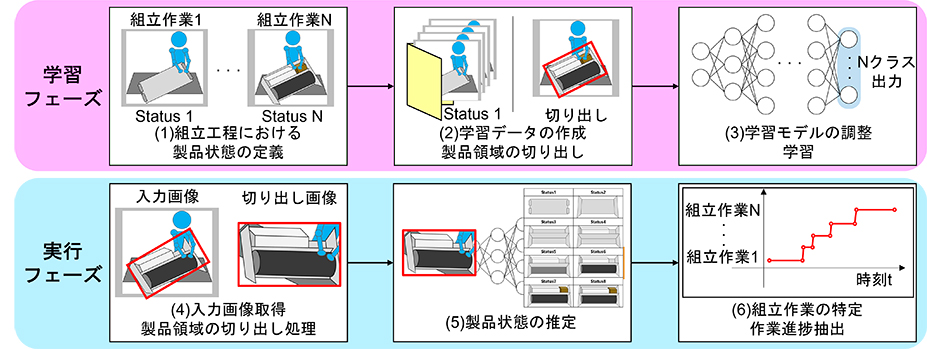
そこで、組立工程では作業の進度に応じて製品の外観も変化していくことに着目し、作業映像から深層学習を用いて作業対象製品への様々な部品の組付け状態を推定することにより作業進捗を自動で抽出する技術を開発しました。実際の組立工程で本手法を評価した結果、製品状態の推定精度が90%を超え、作業進捗の抽出に十分な精度であることを確認しました。
この技術は量産・受注生産など生産形態を問わず製品の外観が変化する組立製品を対象に適用可能です。今後、当社のグローバル工場に本技術を適用展開し、人手作業からの脱却、生産性の向上を図っていきます。
ご参考: 関連技術が評価され、こちらも受賞しました。
製品状態、作業箇所、作業者骨格情報に基づく要素作業推定手法で
情報処理学会 第76回ユビキタスコンピューティングシステム研究会企業発表賞を受賞
掲載誌等
製品状態、作業箇所、作業者骨格情報に基づく要素作業推定手法で
情報処理学会 第76回ユビキタスコンピューティングシステム研究会企業発表賞を受賞
公開日 2023年1月25日
- 生産エンジニアリング技術
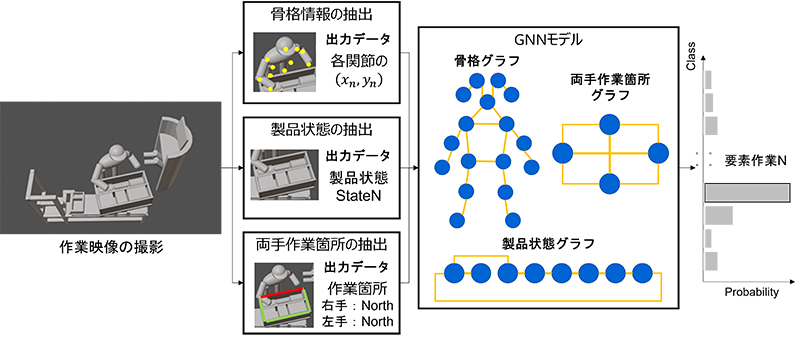
本賞は、情報処理学会において、「ユビキタスコンピューティングに関連する技術の進展に寄与した研究を表彰する」ものです。作業現場における複数の情報を統合的に活用し、作業内容を高精度に推定する当社技術の有効性が認められ、受賞につながりました。被表彰者は、当社の大島宏友、吉井崇哲、蚊戸健浩、浪岡保男と、大阪大学の前川卓也准教授の5名で、授賞式は2023年5月に予定されています。以下に技術の概要を紹介します。
モノづくりの現場では、作業者や装置の加工進捗を継続的に把握し、計画に対する遅れの原因解明と改善施策により生産性を向上させています。しかし、人による作業の進捗状況を自動で判定することは難しく、特に作業が連続する組立工程では要素作業単位に分割して把握することは困難です。現状では、人手で把握していますが、作業を分析し、効率を判定する専門性を有する人員確保が大きな課題となっています。
そこで、GNN(Graph Neural Network)を用いて、組立工程の連続する作業を要素作業単位で推定する技術を開発しました。入力情報として、各要素作業における製品状態、作業者の骨格情報、および製品に対する作業者の両手作業位置を使用しており、これら3つの情報を統合的に学習して要素作業を推定することが可能です。
実際の組立工程で行われた作業を観察したデータを用いて本手法を評価し、要素作業の推定精度が約85%と良好な結果を確認しました。
今後、当社のグローバル工場に本技術・手法を適用展開し、人手作業の更なる効率向上を図っていきます。