
ニュース&トピックス
World Robot Summit 2018 サービスカテゴリーフューチャーコンビニエンスストアチャレンジ 総合優勝・経産大臣賞受賞
当社は、10月17日から21日までの5日間、東京ビッグサイトで開催されたWorld Robot Summit 2018(以下、WRS)の国際ロボット競技会(World Robot Challenge)にチームU.T.T.(株式会社東芝と名城大田崎研究室注1の合同チーム)として出場し、開発中の走行ユニット、吸着ユニットと市販アームを組み合わせたロボットで、サービスカテゴリーフューチャーコンビニエンスストアチャレンジ(以下、FCSC)の中の「陳列・廃棄タスク」において1位を獲得しました。FCSCとしても総合優勝し、経済産業大臣賞を受賞しました。
本ロボットは物流、店舗など、さまざまな用途に利用可能なロボットを、短期間・低コストで製作するために、開発中の汎用自律走行ロボットプラットフォーム注2が採用されています。
少子高齢化に伴う労働力不足を補うため、さまざまな用途でのロボットの活躍が期待されています。一方で、用途にあわせてロボットの作業を構築するためには、多くの専門知識、時間がかかります。
そこで当社は、ロボットのハードウエアを機能ごとにユニット化し、ソフトウエアをプラットフォーム化したロボットプラットフォームの開発を進めています。本技術により、必要な作業に応じてユニットを組み合わせることで、適切なハードウエア、ソフトウエアの構成をいち早く構築でき、目的にあわせた多様な用途のロボットを短期間で低コストに開発することが可能になります。
これまでに、ロボットの全方向移動を可能にする走行ユニットや、グリッパーでの把持が困難な物品を吸着して捉える独自の吸着ユニットを開発しています。
走行ユニットは、特殊車輪を用い、東芝の持つロボットの走行制御技術により、任意の方向への並進動作と旋回動作が同時に実行可能であり、高い位置精度で停止することができます。
また、吸着ユニットは、内部に小型ポンプ・バッテリー・無線機を備え、無線により吸着ON/OFFを切り替え、約550gの物品の吸着が可能です。グリッパーでの把持が困難な物品であっても、吸着ユニットを用いることで物品を吸着し持ち上げることが可能になります。
今回はさらに、これらのユニットを組み合わせ、ロボットプラットフォームを活用し、店舗での商品陳列作業を行うロボットを試作し、このたびWRSサービスカテゴリーFCSCにチームU.T.T.として出場しました。ロボットプラットフォームを活用することで、競技会に向けたロボットを短期間で製作、ソフトウエアを約一か月で実装しました。走行ユニットの停止精度を活かした確実な商品棚の引き出し動作、グリッパーと吸着ユニットを使い分けて、おにぎり、ドリンク、弁当といったさまざまな種類の商品、さまざまな姿勢のサンドイッチを把持し、陳列する作業を実現しています。
競技会においても、安定した動作により、陳列・廃棄タスク競技にて1位を獲得、またFCSC各タスクの1位の中から、総合優勝を決めるエキシビションでは、ロボットの走行制御技術も披露し、FCSC全体でも総合優勝を遂げました。
今後、ロボットプラットフォーム化をさらに進めることで、認識・計画・制御の優れた技術を取り込み、ロボット未活用領域へのロボット導入を加速すべく、研究開発を進めていきます。
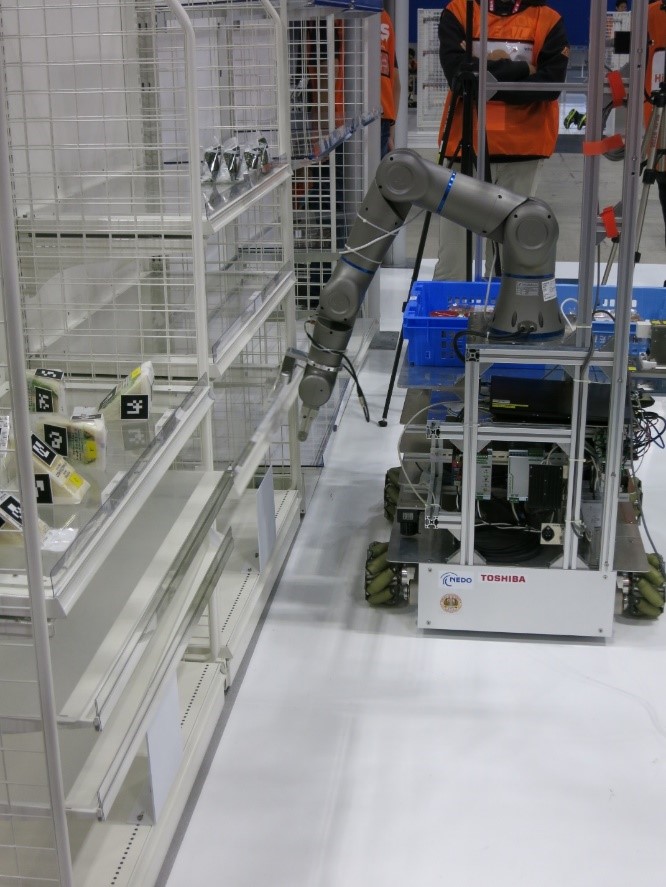

商品陳列作業を行うロボット 吸着ユニットによる商品の把持
- 注1
- 名城大学理工学部電気電子工学科田崎豪研究室は、マーカーを用いてサンドイッチを認識する技術を担当しました。
- 注2
- 汎用自律走行ロボットプラットフォームは、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託事業「ロボット活用型市場化適用技術開発プロジェクト」にて開発をしています。