
活動事例
開発秘話
当社開発の製品や技術について、そのきっかけや開発過程のエピソードなどを紹介します。
「列車の自動運転技術の開発」
-乗り心地と停止位置精度を両立し、駅間走行時間を守りながら省エネ走行-
自動列車運転システム
自動列車運転(Automatic Train Operation、以下ATO)システムは、その名の通り、運転士に代わって列車の運転を自動で行うものです。運転士は出発ボタンを押すだけで、あとは、駅出発から駅間走行を経て次駅の所定位置に停車するまで、ATOが適切な制御指令を出力します。定位置停止(Train Automatic Stop Control、以下TASC)システムは、ATOの機能のうち、駅への停止制御のみを行うものです。運行ダイヤの高密度化やホームドアの導入に伴い、運転士の負荷低減や均一で正確な運転を目的に、多くの鉄道会社でATOやTASCの導入が進められています。
列車の自動運転の歴史は意外と古く、1980年代には複数の路線で営業運転が行われています。東芝も開発を行っていましたが、受注には至りませんでした。しかし、2004年、東武鉄道(株)東上線の東京地下鉄(株)副都心線への乗り入れ決定に伴い、改めてATOの開発を開始しました。後追いで開発するからには、他社ATOより使い勝手の良いものを実現する必要があります。そこで、以下の3点を実現するATOを開発することとしました。
(1)駅間を決められた時間で走行するATO
(2)乗り心地と停止位置精度を両立するATO
(3)個々の編成での特性のばらつきに対応するATO
これらを実現するため、ATOの主要機能である制御指令算出機能(図1)は、駅間の時間配分を決定する走行計画機能、列車の動きを予測して制御指令を選択する走行制御機能、これらのベースとなる列車動特性モデルを自動調整する車両特性推定機能の3つで構成することとしました(図2)。これらの機能について、以下に説明します。
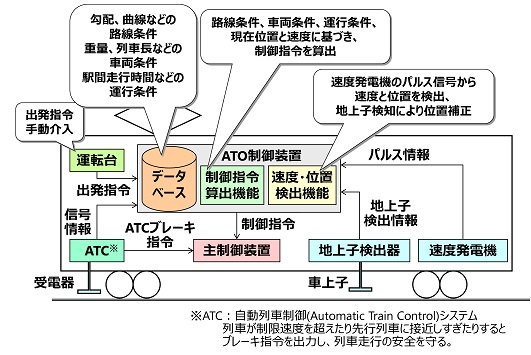
図1 ATOシステム構成
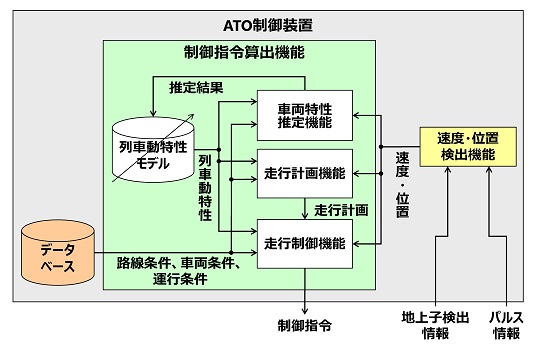
図2 制御指令算出機能の主要な機能
駅間を決められた時間で走行するATO ― 走行計画機能
ベテラン運転士は、駅間を決められた時間で走行するために、どこでどのくらい力行(アクセル)や制動(ブレーキ)を行えばよいか、熟知しています。さらに、効果的に惰行を取り入れて、省エネ走行を行っています。
惰行とは、力行や制動を行わず慣性で走行することです。エネルギーを消費しないうえ、モータやブレーキ装置でのエネルギー損失も発生しないので、長く惰行するほど省エネな走行となる傾向があります。例えば、駅間の下り坂の部分では、制限速度ぎりぎりまで力行する代わりに、途中で惰行に切り換え、下り坂を利用して加速すれば、消費エネルギーを節約することができます。しかし、惰行が多すぎると、列車の平均速度が下がり、駅間走行時間が所定走行時間をオーバーしてしまいます。
そこで、駅出発時に、力行、定速走行、惰行、制動を、どこでどのくらい行うか、あらかじめ走行計画として算出しておくことにしました(図3)。所定走行時間をオーバーしない範囲で定速走行を減らし惰行を多用する走行計画を立てることで、定速を維持するための細かい力行や制動の繰り返しを減らし、乗り心地を良好に保ちながら省エネルギーな走行を実現します1), 2), 3)。
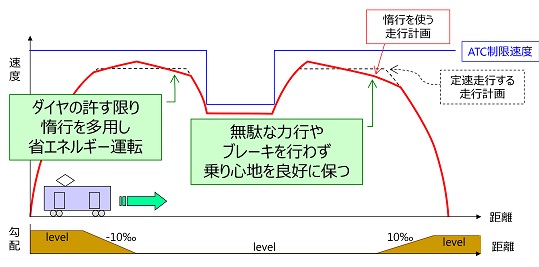
図3 省エネルギーな走行計画の算出
ATOには、列車の車両性能に関して、力行時の加速度、制動時の減速度、空気抵抗式、勾配抵抗式などから成る列車動特性モデルを持たせておくことにより、車両性能に応じた走行計画を算出することができるので、高い精度で走行時間を合わせることができます。駅間毎にシミュレーションや走行試験を繰り返して駅間走行時間の調整を行う必要はありません。
乗り心地と停止位置精度を両立するATO ― 走行制御機能
駅所定位置への定位置停止制御は、制御の目標となる停止パターンを算出し、列車速度が停止パターンに追従するように制御指令を調整する方法が主流です。停止位置精度を確保するためには、制御指令を細かく調整し、停止パターンからのずれを抑える必要があります(図4)。
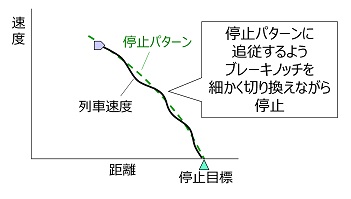
図4 従来方式での定位置停止制御
列車の制御指令は、力行と制動のそれぞれについて離散的に設定されたノッチと呼ばれる指令値で出力します。手動運転では、ブレーキノッチは常用7~8段が一般的ですが、ATOやTASCを導入する場合は、きめ細かい調整を行うために、15段や31段とすることが多いようです。
副都心線に乗り入れる東武車両3車種のうち、9000系9000型と同9050型は、ブレーキノッチ7段で運用されてきた車両です。ATO搭載を想定した新造車ではないので、15段ないし31段でのノッチ指令を可能とするためには、全9編成について改造工事が必要となり、手間もコストも掛かってしまいます。しかし、7段ノッチのまま、停止パターンに追従させようとして細かくノッチを切り換えると、ノッチを切り換えた時の減速度の変化が比較的大きいため、乗り心地が悪化する可能性があります。
そこで、ブレーキノッチ段数を増やさなくても乗り心地と停止位置精度を両立する方法として、停止位置を予測し、停止目標位置を過走しないブレーキノッチのうち停止位置誤差の最も小さいものを選択するようにしました(図5)。ATOの持つ列車動特性モデルに引張力やブレーキ力の反応遅れの情報を含めることにより、ブレーキ力の反応遅れを考慮して適切なタイミングでノッチを切り換えることができ、少ないノッチ切換で精度よく停止することができます1), 2), 3)。
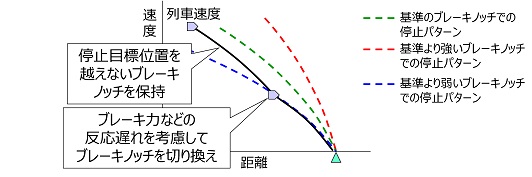
図5 東芝ATOの定位置停止制御
駅間走行において、走行計画に従って走行する際も、およそ2秒後の列車の速度と位置を予測しながら、制限速度を超えないように適切なタイミングでノッチ指令を調整します1), 3)。
個々の編成での特性のばらつきに対応するATO ― 車両特性推定機能
走行計画の算出や、停止位置予測の際は、列車動特性モデルを利用しますが、超満員乗車によるブレーキ力の不足や天候によるブレーキ力の変動、編成間での個体差による特性のばらつきなどにより、実際の車両特性との間には多少なりともブレーキ力のずれが生じます。
例えば、実際のブレーキ力が列車動特性モデルより強いと、定位置停止制御の際、ATOの予測よりも大きく減速し、所定の停止位置までたどり着けずにショート停車となる可能性があります。ショート停車を回避するためブレーキノッチを弱くしていくと、停止間際に弱いブレーキノッチで低速のまま走行することになり、駅間走行時間が延びてしまいます。
逆に、実際のブレーキ力が列車動特性モデルより弱いと、定位置停止制御の際、ATOの予測したほど減速せず、所定の停止位置を過走してオーバー停車となる可能性があります。オーバー停車を回避するためブレーキノッチを強くしていくと、強いブレーキを掛けたまま停止するため、停止時の衝撃が大きくなってしまいます。
そこで、自身の出力したノッチ指令と列車速度の推移から実際の車両特性を推定し、列車動特性モデルを調整します。
走行中は、リアルタイムに調整を行います。車両特性の推定結果を速やかに列車動特性モデルに反映することにより、超満員乗車によるブレーキ力の不足や天候によるブレーキ力の変動の影響を受けにくい制御を実現できます1), 2), 3)。
また、駅停止の度に、学習による調整を行います。個々の編成での特性のばらつきに応じた列車動特性モデルが得られるので、全編成で走行試験を繰り返して制御パラメータの合わせ込みを行う必要がなく、現地調整期間の短期化が可能です2)。車両特性の経年変化にも対応し、走行時間精度や停止位置精度、乗り心地の悪化を抑制することができます。
夜間の現車走行試験
開発と並行して、東武鉄道殿、東京メトロ殿のご協力をいただき、東武東上線や東京メトロ有楽町線で夜間の現車走行試験を繰り返し、機能の確認を行いました。運転士さんに深夜勤務をお願いし、試験用に作成していただいたダイヤに従って、終電後の線路を往復します。既に複数路線にATOを導入していた東京メトロ殿からは、初めて製品化する東芝に対し、様々なアドバイスをいただきました。
最終的に、東京メトロ殿から、以下のコメントをいただくことができました。
・駅出発から下り坂が続く駅間では早めに力行から惰行に切り換えるなど、ベテラン運転士の省エネ走行と同等の走行ができている。
・7段ブレーキのままでも、停止位置精度を確保しながら、乗り心地よく減速できている。
始発電車で居眠りしながら帰った日々も、いい思い出となりました。
営業路線での停止位置精度評価
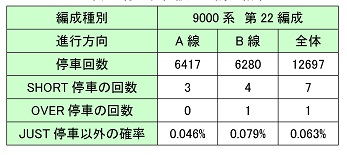
2014年12月から2015年3月にかけて、東京メトロ南北線と、乗り入れ先の埼玉高速鉄道線・東京急行目黒線で、停止位置精度の評価を行いました。各駅の所定の停止位置には、列車が停止位置精度±35cmの範囲に停止したかどうかを判定する地上子が設置してあり、JUSTと判定された場合のみホームドアを開閉できます。南北線9000系車両第22編成のATO装置で、地上子の判定結果(JUST/SHORT/OVER)のデータを3ヵ月にわたって採取した結果、判定がJUSTでなかったのは、計12,697回の停車のうち8回(0.063%)のみでした(表1)。
このうち、1回だけ発生したOVER停車については、走行記録を解析した結果、ブレーキ指令に対して減速度が明らかに小さいことがわかりました。レール上にこぼれた油を踏むなどしてブレーキが十分利かなかったことが原因と考えられます。7回のSHORT停車のうち2回は、走行記録からは、過度な手動介入があったことが原因と考えられます。これら3回のデータを除くと、判定がJUSTでなかったのは5÷12,694=0.039%となります。
表1 停止位置誤差の調査結果
ATO装置内部で認識する停止位置誤差は、OVER寄りに分布していることがわかりました(図6、図7)。これは、多少OVER停車となりそうでも、乗り心地を考慮して停止間際に強いブレーキノッチを指令しないようにしているためと考えられます。
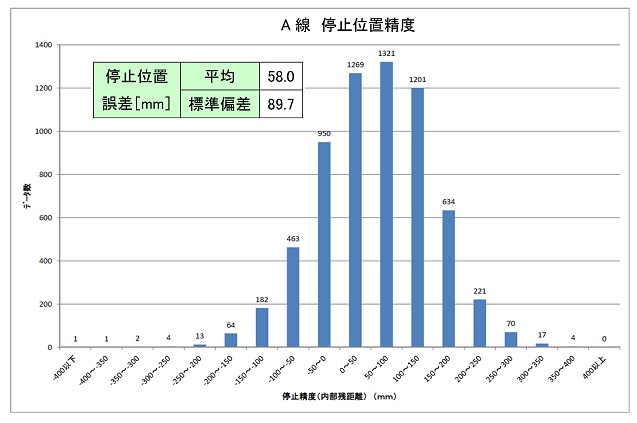
図6 ATO装置内部の認識値での停止位置誤差の分布(A線)
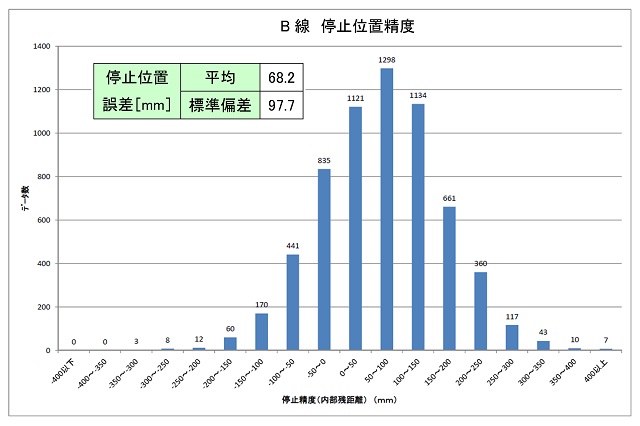
図7 ATO装置内部の認識値での停止位置誤差の分布(B線)
適用状況
2008年6月に開業した東京メトロ副都心線への乗入用東武車両14編成を皮切りに、2016年2月現在、東芝ATOは延べ5路線に採用され、うち4路線で稼働中、残る1路線でも2018年度から稼働予定です。今後は、ブレーキ力変動の大きい車両に適用した場合の乗り心地や停止位置精度の改善を行い、さらなる適用路線拡大を目指します。
最後に、ATO装置の導入・試運転データの計測に当たり、多くの関係者の皆様のご指導・ご協力を得たことに感謝申し上げます。
参考文献
1) 大矢、他:地下鉄向け自動列車運転システム;東芝レビュー,Vol.63,No.12,pp.41-45 (2008)
2) 高木、他:予測制御を応用したATOシステム ―営業運転における停止位置精度の評価―;第47回鉄道サイバネ・シンポジウム論文集,論文番号530 (2010)
3) 大矢、他:東芝の自動列車運転システム ―走行計画により自動で駅間走行時間を守りながら省エネ走行を実現―;鉄道車両と技術,No.177 (2011)