生産技術センター

生産技術トピックス
2026年
フォトニック結晶を備えた量子カスケードディテクターの開発で応用物理学会 講演奨励賞を受賞
公開日 2026年7月10日
- 光応用・画像検査技術
本賞は、応用物理学会が主催する学術講演会において、応用物理学の発展に貢献し得る優れた一般講演論文を発表した若手会員を表彰するものです。フォトニック結晶構造を備えた量子カスケードディテクターに関する新規性および有用性が認められ、受賞に至りました。被表彰者は当社の塚田知樹であり、授賞式は2026年9月に予定されています。以下に技術の概要を紹介します。
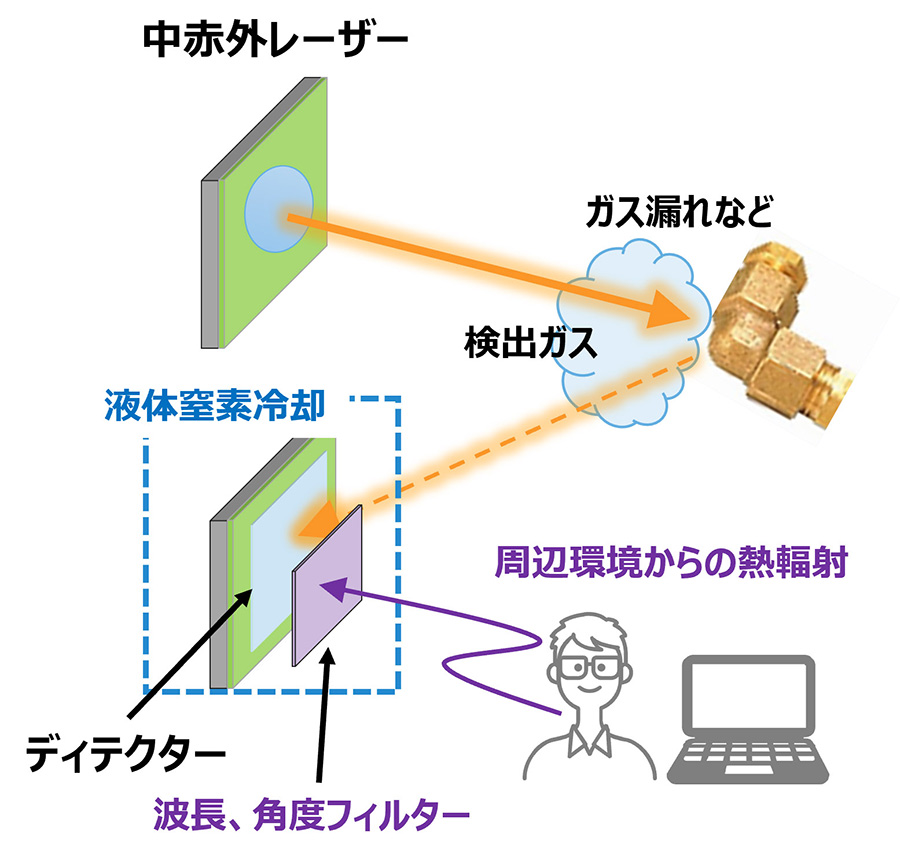
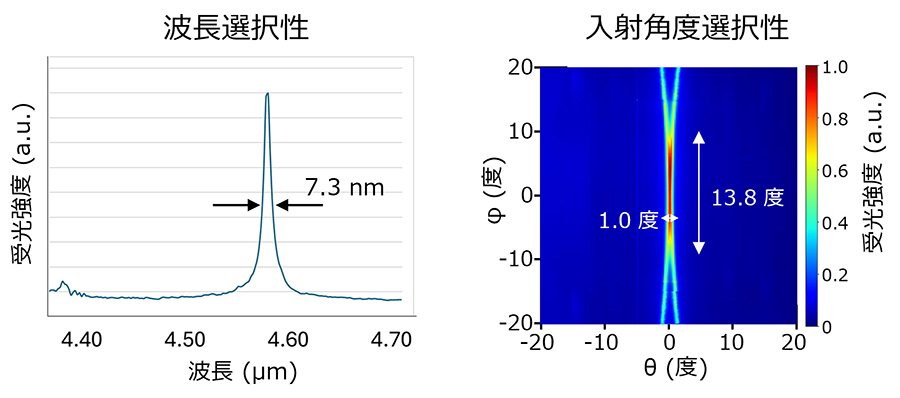
様々な分子が固有の吸収スペクトルを持つ中赤外の波長域は、狙ったガスの濃度を高感度に検知できることから注目されています。しかしこの波長域での測定には、周辺環境からの熱輻射がノイズになり、感度を下げるという大きな課題が有ります。そのため従来、波長フィルターや角度フィルターを用いたり、フィルター自体の熱放射を抑えるために液体窒素冷却する必要があり、装置の複雑化を招いていました。そこで本研究では、この課題を解決するために、フォトニック結晶構造を備えた量子カスケードディテクターを開発しました。フォトニック結晶の回折効果を用いることで、特定の波長および入射角度の光のみを受光素子の活性層へと導くことができます。試作したデバイスを評価した結果、従来の受光素子では成しえなかった、波長選択性と角度選択性を、素子そのものに持たせることに成功しました(波長半値幅7nm、角度制御性1.0°×13.8°)。また、ディテクター周辺からシグナル光と同程度の強度のノイズ光が入射する条件において、従来のMCTディテクター*1)と比較し、受光するノイズを1/14以下に低減できることを確認しました。
今後は、本技術を用いることで外付け光学フィルターを不要とし、ノイズの影響を抑えた高感度ガスセンシングへの応用を進めていきます。
*1) 水銀カドミウムテルル化合物(HgCdTe)ディテクター
謝辞
本研究は、防衛装備庁 安全保障技術研究推進制度 JPJ004596の支援と、文部科学省 ナノテクロジープラットフォーム事業JPMXP09F21IT0002の支援を受けて実施しました。
「スマート物流を実現するマルチ搬送AMR制御技術開発」で2025年度日本機械学会奨励賞(技術)を
受賞
公開日 2026年6月8日
- 知能化ロボット・メカトロニクス技術
本賞は、一般社団法人日本機械学会において、「機械工業または広く産業社会に関わる主として技術上の業績をあげた個人」に与えられるものです。既存設備を活かした導入が可能な、AMR*1)による搬送システム技術開発の取り組みが評価され、本賞を受賞しました。被表彰者は、当社の伊藤悠介で、2026年4月23日に表彰式が行われました。以下に技術の概要を紹介します。
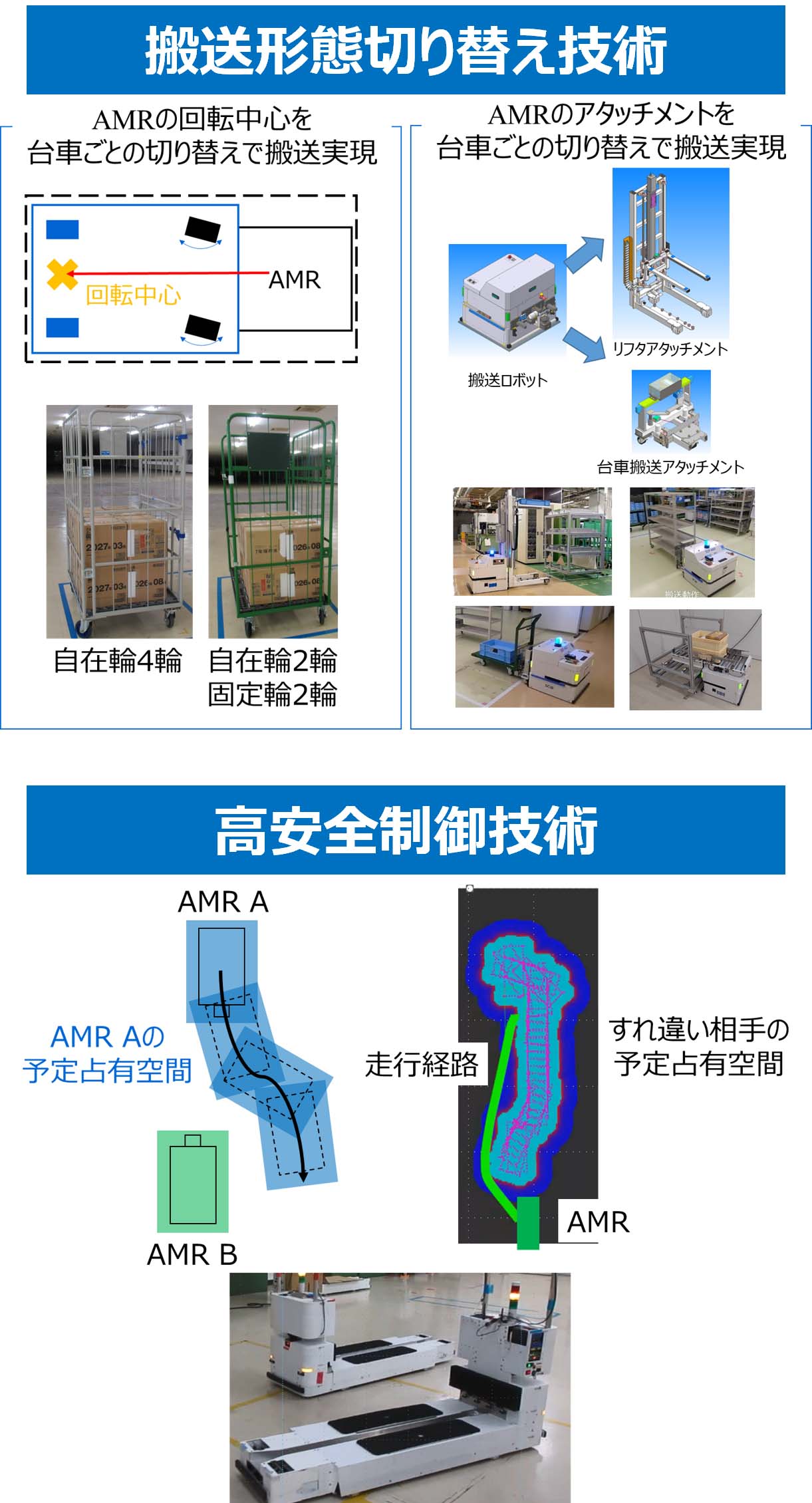
物流・製造現場では、労働力不足が深刻化、搬送作業の自動化ニーズが高まっています。AMRは柔軟なレイアウト対応が可能な有効な手段です。しかし、機種間連携や対応台車の制約、安全性の面で課題があり、導入が限定的でした。これに対し、異なるAMRを統合する共通プラットフォーム技術、台車に応じた搬送形態切り替え技術、複数台のAMRが安全に共存する高安全制御技術から構成される「マルチ搬送AMR制御技術」を開発しました。共通プラットフォームにより複数メーカーのAMRを統合し、搬送形態の切り替えにより多様な台車搬送を実現します。予定占有空間に基づく制御により衝突やデッドロックを回避し、安全なすれ違い走行が可能となります。これにより、既存設備を活かした柔軟で安全な搬送システムを実現しました。
今後、本技術を活用して物流・製造現場における多様な搬送作業の自動化実現に貢献していきます。
*1) Autonomous Mobile Robotの略称。自律移動ロボット。
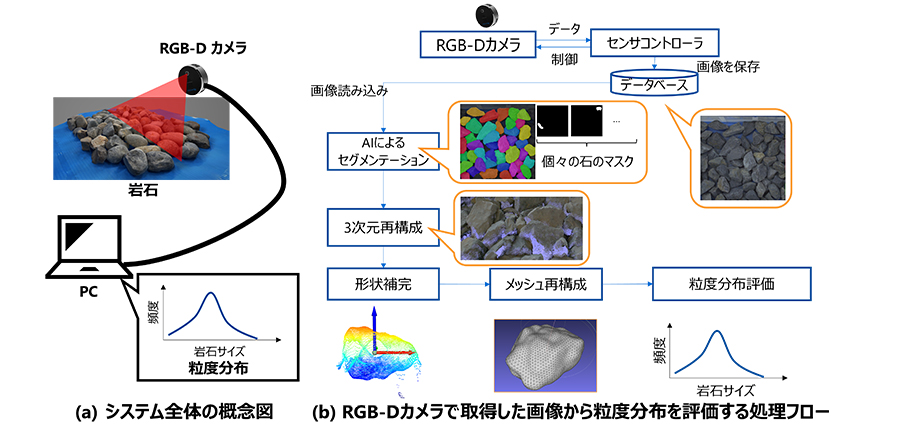
蓄熱用岩石向けの粒度分布評価システムの開発で、日本機械学会奨励賞(技術)及び日本機械学会 IIP部門一般表彰(MSD・IIP合同表彰)を受賞
公開日 2026年5月11日
- 機械物理・機械システム・ものづくり工学
本研究では市販のRGB-Dカメラを用いて蓄熱用岩石の粒度分布を簡易に評価する手法を提案し、その有効性が認められ、両賞の受賞となりました。日本機械学会奨励賞(技術)は、独創性と発展性に富む業績を対象として贈られるもので、表彰式は2026年4月23日に明治記念館にて行われました。また、日本機械学会 IIP部門一般表彰(MSD・IIP合同表彰)は、日本機械学会 情報・知能・精密機器部門(IIP部門)講演会(IIP2025)において、内容、プレゼンテーションともに優れた講演を対象として贈られるもので、表彰式は2026年3月2日に名城大学 天白キャンパスにて行われました。受賞者は当社の神内 拓真、武田 裕と、共同研究先である東芝エネルギーシステムズ株式会社(当時)のメンバーです。以下に技術の概要を紹介します。
近年、再生可能エネルギーの導入拡大に伴い、余剰電力を熱として蓄える技術が注目されています。特に岩石を蓄熱材とする方式は環境性や経済性に優れており、実用化が進められています。一般に、このような設備では、充填層内の流動・伝熱特性評価のために岩石の粒度分布を把握することが重要ですが、従来の充填層の圧損や空隙体積から平均径を間接推定する手法は計測コストに課題がありました。本技術は、市販の安価なRGB-Dカメラでバラ積みされた岩石を撮影し、AIを含む画像処理により個々の岩石を抽出して粒度分布を推定するものです。取得した色画像・深度情報を用いることで、非接触かつ簡易な構成で評価作業の省力化が期待できます。
今後は、蓄熱設備の設計・評価に資する粒度分布評価手法として、本技術の活用を進めていきます。
後付ユニットによる装置操作自動化システム(特許第6580890号)が、令和7年度 関東地方発明表彰 発明奨励賞を受賞
公開日 2026年4月10日
- 知能化ロボット・メカトロニクス技術
本発明表彰は、各地方における発明の奨励・育成を通じて、科学技術の向上と地域産業の振興に貢献することを目的とした表彰制度です。各地方で優れた発明・考案・意匠を完成させた方や、それらの実用化に尽力された方の功績を称え、顕彰するものです。被表彰者は当社の小林大介です。授賞式は令和7年11月に開催されました。
以下に技術の概要を紹介します。本技術は既存の製造装置を簡易かつ低コストで自動化する技術で、「あやつり制御技術」と呼んでいます。自動化されている製造装置でも、運転開始や材料供給など、作業者が行う装置操作が必ずあります。これらの定型的操作は項目数が多く、作業に時間がかかり、操作ミスをする可能性もあります。あやつり制御技術では、操作信号の取得・送信機能を備えた後付けユニットを製造装置に取り付けます。このユニットが装置の状態を把握し、必要な操作信号を自動で送信することで、従来は作業者が行っていた装置操作を自動化します。これにより作業時間の短縮と操作ミス防止を実現しました。あやつり制御技術は、東芝Gr内で2016年から導入を開始し、約250台を設置しました。また「Meister Apps™ 設備あやつり制御パッケージ」として製品化されています。低コストで既存設備に自動化機能を追加できるため、様々な製造現場において、生産性向上や既存装置の新たな活用などが期待できます。
今後もあやつり制御技術の普及を通して、社会を支えていきます。

2025年度日本機械学会優秀技術者表彰(ゴールド)を受賞
公開日 2026年4月10日
- 機器試作・ファクトリーオートメーション技術
本賞は、機械工学・機械工業の実務に長く携わり、業務の関係上、学会発表や論文投稿などの学術活動の機会が少ない学会員に対し、所属する特別員が顕著な業績があると認め、その業績により機械工学・機械工業の発展への貢献が評価される優秀技術者を表彰するものです。被表彰者は当社の上野裕史です。設計技術の高度化と若手育成に尽力しつつ、試作機開発を通じて先端技術の社会実装を加速し、機械工業の発展に多面的に貢献したことが認められ、日本機械学会優秀技術者表彰(ゴールド)を受賞しました。学術活動の機会が少ない技術者にとって、このような賞の受賞は励みとなります。
今後も、技術の研鑽をつみ、社会課題の解決に貢献していきます。

スポット溶接検査ロボットにおける検査プローブの位置補正機能の開発でIIP2025 MSD・IIP部門連携表彰を受賞
公開日 2026年4月10日
- 知能化ロボット・メカトロニクス技術
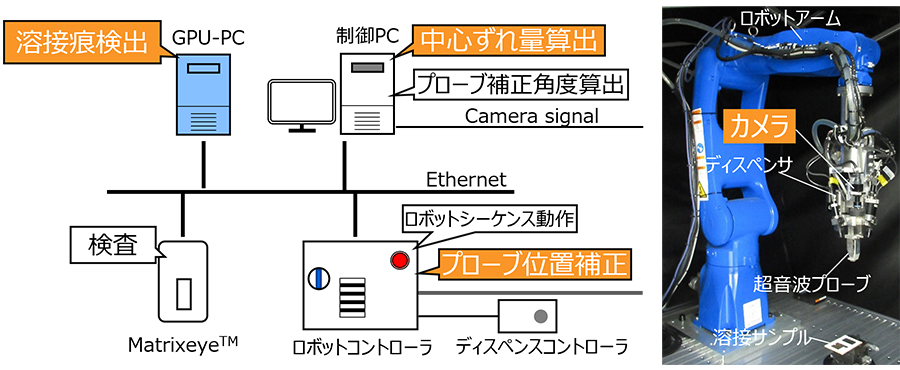
本賞は、一般社団法人日本機械学会 情報・知能・精密機器部門が主催するIIP2025情報・知能・精密機器部門講演会(MSD・IIP部門連携セッション)において、講演内容・プレゼンテーションともに優秀な講演を表彰するものです。2025年3月に開催された本講演会での、当社のスポット溶接検査ロボットに関する発表に対して受賞が決定いたしました。被表彰者は当社の千葉康徳です。授賞式は2026年3月2日に行われました。以下に技術の概要を紹介します。
当社では、超音波検査技術を用いたスポット溶接検査装置Matrixeye™と6軸垂直多関節の産業用ロボットを組み合わせ、スポット溶接部の検査を自動実行するロボットシステムを実用化しています。このシステムでは、超音波プローブを溶接部に接触させる位置をあらかじめ教示しておく仕組みになっていますが、ワークの搬送誤差などに起因する超音波プローブの接触位置ずれを、溶接点ごとに補正する機能の実現が課題でした。
そこで、溶接痕をカメラにより検出し、教示点に対する誤差を算出することで、超音波プローブの接触位置を自動補正する機能を開発しました。溶接痕は形状や外観にばらつきがあるため、高い検出ロバスト性と高速処理の両立が求められます。そのため、従来のルールベースアルゴリズムではなく、物体検出AIであるYOLOv3*1)を用いて溶接痕を検出し、得られたバウンディングボックス内で溶接痕のずれ量を算出する二段階の手法を適用しました。
実際の製造ライン適用にあたっては、溶接痕検出の信頼性に加え、処理時間および超音波プローブの位置決め精度が重要となります。これに対し、開発した機能を既存システムに実装し、実用上十分な性能を有することを実証しました。今後は、溶接痕検出のさらなる信頼性向上に加え、学習データの運用方法について検討していきます。
*1) YOLOv3(You Only Look Once version 3)は、2018年に発表された高速かつ高精度なリアルタイム物体検出アルゴリズム