生産技術センター

生産技術トピックス
2025年
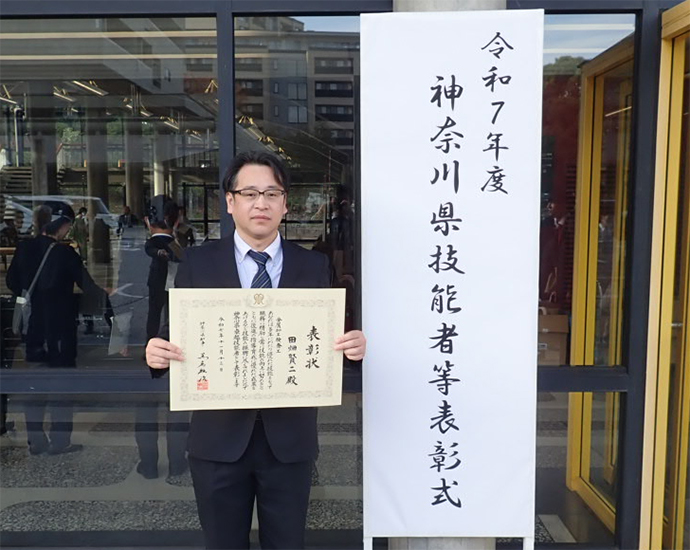
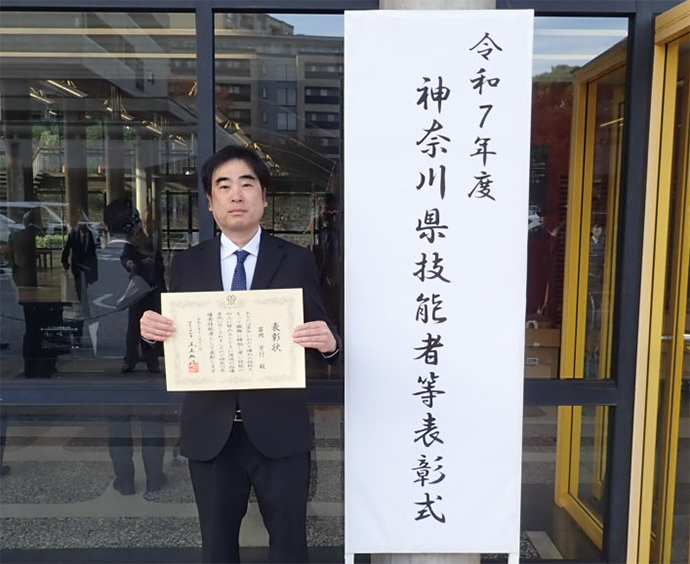
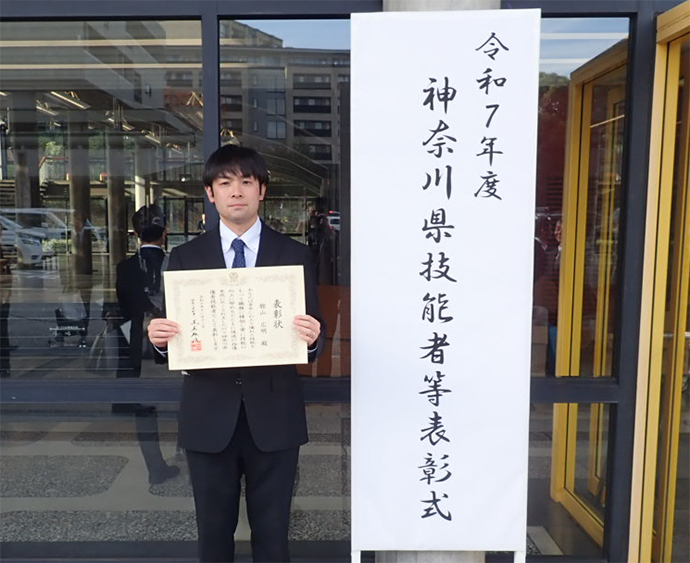
令和7年度 神奈川県技能者等表彰 卓越/優秀/青年優秀技能者を受賞
公開日 2025年12月16日
- 機器試作・ファクトリーオートメーション技術
本賞は、神奈川県知事が優れた技術・技能を持つ県内の技能者に対して行う表彰で、県内の産業発展や人材育成に貢献する技能者を称えるとともに、若い世代にも技術・技能の重要性や魅力を伝えることを目的としています。被表彰者は当社の田畑賢二、富岡芳行、舘山広明、古川晋丞、小林京平です。授賞式は令和7年11月に開催されました。
・卓越技能者:田畑
精密加工の第一線で長年活躍し、製品開発のスピード向上や課題解決に貢献
・優秀技能者:富岡
複雑形状や特殊材料の加工に挑み、品質・コスト・納期改善を推進
・優秀技能者:舘山
自動化装置の開発や研修会講師として後進育成に尽力
・青年優秀技能者:古川
高精度加工を牽引し、品質維持活動にも積極的に取り組む
・青年優秀技能者:小林
加工効率の改善や品質安定化に挑戦し、幅広い業務への意欲を示す
それぞれが現場で培った技能を活かし、課題解決や人材育成に取り組んできた姿勢が高く評価されました。当社は今後も、こうした技能者の挑戦と成長を支え、ものづくりの価値を次世代へつなげていきます。
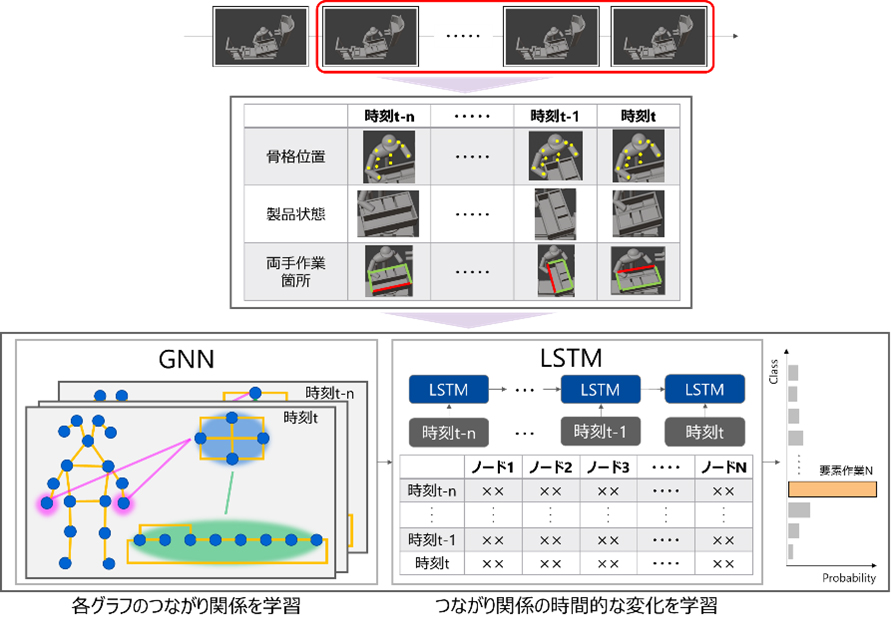
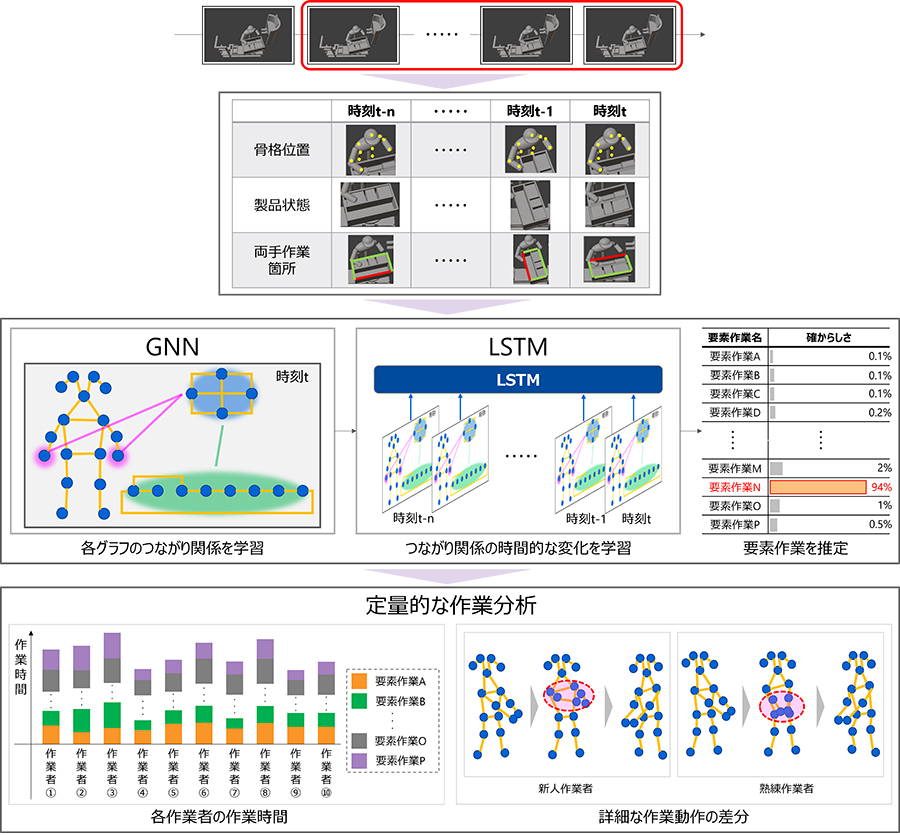
複数種類の時系列作業データに基づく工程作業推定手法で、電気学会2024年電子・情報・システム部門技術委員会奨励賞を受賞
公開日 2025年12月16日
- 生産エンジニアリング技術
本賞は、電気学会が主催する2024年電子・情報・システム研究会において、「研究会活性化への貢献による功績を顕彰する」ものです。定量的な作業分析につながるデータを自動抽出できることが認められ、受賞につながりました。被表彰者は当社の大島宏友、新沼歩、福田雅允と共同研究先の大阪大学の前川卓也教授、東京都立産業技術大学院大学の浪岡保男教授です。授賞式は2025年2月1日に開催されました。以下に技術の概要を紹介します。
当社では、これまでに作業者の作業内容を自動かつ高精度に推定する手法として、GNN(Graph Neural Network)とLSTM(Long Short Term Memory)を組み合わせた作業推定モデルを開発し、90%を超える推定精度を実現しています*1)。
今回、この作業推定モデルを使用して、各作業者の要素作業ごとの処理時間や作業動作の定量的な比較が可能となるデータを自動抽出できることを示しました。処理時間にバラつきの多い作業者や要素作業、新人作業者と熟練作業者の姿勢や身体の動かし方の差異を捉えることが可能です。
今後は、当社の国内外の工場に本技術を適用し、定量的な作業分析による生産性の更なる向上を図っていきます。
*1) 生産技術トピックス 2025年 「複数種類の時系列作業情報を統合的に扱う作業推定手法で、情報処理学会DICOMO2024優秀論文賞を受賞」
https://www.global.toshiba/jp/technology/corporate/cmc/rd/topics/2025.html#no224
関連部門・団体
- 大阪大学、東京都立産業技術大学院大学
掲載誌等
- 近日更新予定
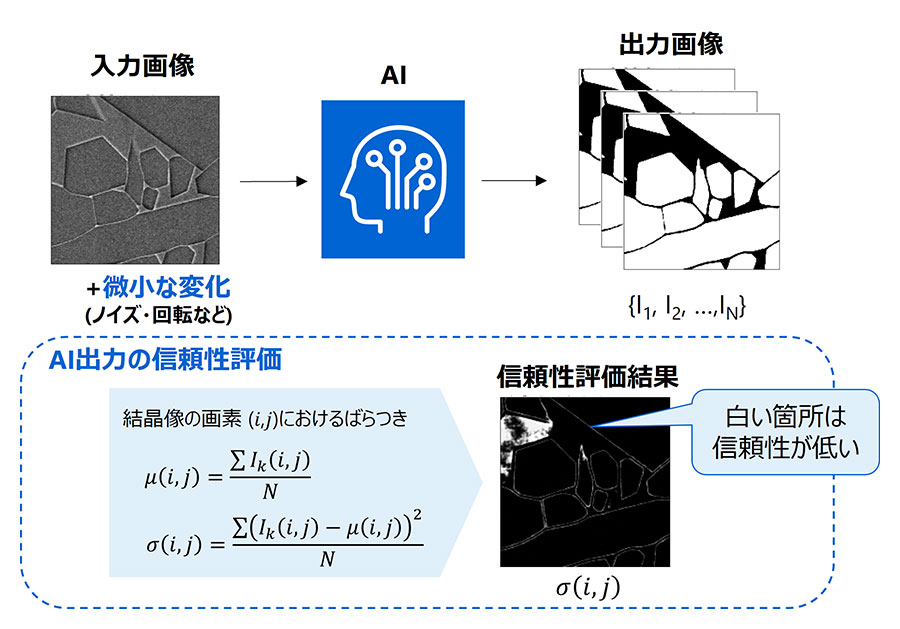
電子顕微鏡像の結晶抽出AI技術で、第24回情報科学技術フォーラム FIT奨励賞を受賞
公開日 2025年10月6日
- 光応用・画像検査技術
本賞は、一般社団法人情報処理学会が開催する第24回情報科学技術フォーラム(FIT2025)において、「一般発表のセッション毎に優秀な発表を1件選定し、贈呈する」ものです。属人的で曖昧であった走査型電子顕微鏡画像の結晶形状解析にAIを適用した手法が評価され、受賞につながりました。被表彰者は当社の内田美幸です。以下に技術の概要を紹介します。
デバイス開発では、走査型電子顕微鏡で撮像した結晶形状と製造プロセスや特性を関連付けて、製造プロセスの適正化や結晶の出来栄え評価を行います。しかし、電子顕微鏡像は作業者の技量による撮像ばらつきが大きいため、解析に高度な画像処理技術が求められ、作業負荷が大きいことが課題でした。
本研究では、AIを用いてばらつきの大きい電子顕微鏡像から結晶形状を抽出する手法を提案しました。画像をパッチと呼ばれる小片に切り分けてからAIを用いることで、画像サイズが大きい場合でも、高精度に結晶形状が抽出可能なことを示しました。また、AIは特定の入力に対して期待通りに動作せず、誤った出力をしてしまう場合があります。そこで、ノイズや回転など、画像に微小な変化を加えた場合の抽出結果の変化からAIの信頼性を評価する技術を提案し、学習時の教示が不十分な箇所を識別可能なことを実証しました。
今後は、本技術を電子顕微鏡像の解析に活用し、製造プロセスの最適化や特性予測など、デバイス開発の効率向上に貢献していきます。
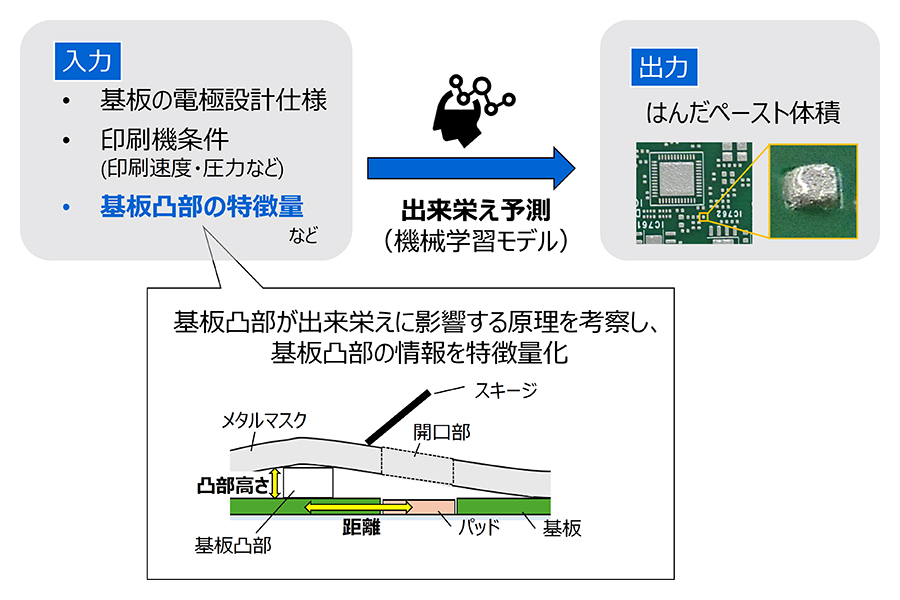
実装基板製造における印刷はんだペースト体積の予測技術の開発で、
第39回エレクトロニクス実装学会春季講演優秀賞を受賞
公開日 2025年9月18日
- 実装技術
本賞は、一般社団法人エレクトロニクス実装学会が主催する第39回エレクトロニクス実装学会春季講演大会において、「エレクトロニクス実装の学術・技術的に優れた講演発表」を表彰するものです。実装基板製造で印刷されるはんだペーストの体積を、機械学習を用いて高い精度で予測する手法を提案したことが認められ、受賞につながりました。被表彰者は当社の永野里奈、田辺成俊、板垣達也、浮田康成です。授賞式は2025年9月4日に開催されました。以下に技術の概要を紹介します。
電子機器に搭載される実装基板の製造では、はんだ印刷工程で基板に転写されるはんだペーストの体積が、最終のはんだ付け品質を大きく左右します。しかし、このはんだペースト体積には、基板の電極設計仕様やはんだ材料、印刷機条件などの多数の因子が相互に影響するため、各因子の適正化に課題があります。そこで、試作を行わずに因子を適正化することを目的として、印刷されるはんだペースト体積を各因子から予測するモデルを開発しました。本開発では、既存の印刷予測手法で用いられる因子に対し、新たにマーキング印字を例とする基板凸部に着目し、その高さとレイアウトを特徴量として取り入れた機械学習モデルを構築しました。それにより、予測精度が4割向上することを確認し、開発モデルの有効性を示しました。
今後は、この予測技術を製造現場に適用し、製造品質の向上と開発・製造LTの短縮に貢献していきます。
関連部門・団体
- なし
掲載誌等
- 近日更新予定
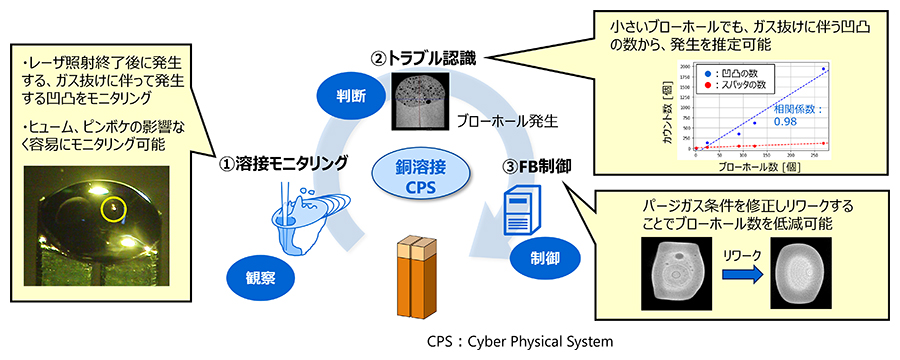
銅レーザ溶接の自動化へ向けたCPS技術の開発で、電気学会 光・量子デバイス研究会 技術委員会奨励賞を受賞
公開日 2025年7月3日
- 光応用・画像検査技術
本賞は、一般社団法人電気学会が主催する光・量子デバイス研究会において、「優秀な研究発表を行った若手研究員を表彰する」ものです。従来検出が困難であった銅レーザ溶接後の内部欠陥に対して、非破壊かつインプロセスで欠陥の発生を予測する手法を提案したことが認められ、受賞につながりました。被表彰者は当社の塚田知樹、黄川田昌和、塩見康友です。以下に技術の概要を紹介します。
近年、電気自動車の普及に伴い、モーターの主要部品である平角銅線のレーザ溶接に対する需要が高まっています。しかし、銅のレーザ溶接では、雰囲気ガスの流れや部材の表面状態などによって、「ブローホール」と呼ばれる溶接内部の空洞が発生します。このブローホールは、外観から判断できないため、破壊検査やX線CT測定での確認が必要であり、検査にコストや時間がかかることが課題でした。
本研究では、銅レーザ溶接において、溶融銅表面からガスが抜ける際に発生する凹凸の数が、銅凝固後に内部に発生するブローホールの数と強い相関があることを見出しました。ヒューム*1)による撮像不良を回避するために、撮影タイミングをレーザ照射終了後から溶融銅が凝固するまでの時間に限定することで、ブローホールの発生を高精度かつ非破壊・リアルタイムで予測するモニタリング手法を構築しました。さらに、モニタリングデータをもとに欠陥箇所へリワーク処理を行うことで、ブローホール発生率を最大93%低減できることを実証しました。
今後は、本技術を活用したブローホール検知により、欠陥発生を低減するレーザプロセスの開発を効率的に行うとともに、本技術の製造ラインへの実装を進めることで、溶接工程における品質向上と自動化の実現に貢献していきます。
*1) 金属が溶接中に高温で蒸発した後、空気中で冷却されてできる微細な粉じん
関連部門・団体
- なし
掲載誌等
- 一般社団法人 電気学会
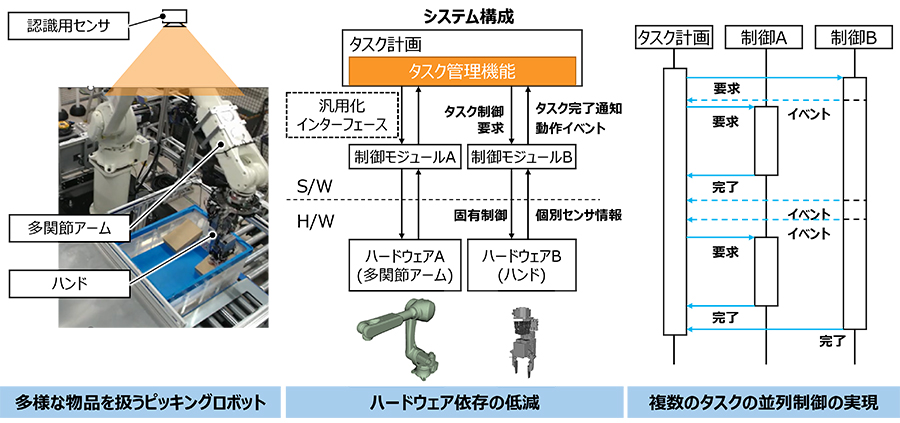
「並列動作を考慮した知能化ロボットの状態管理技術の開発」で2024年度日本機械学会奨励賞(技術)を受賞
公開日 2025年6月5日
- 知能化ロボット技術
本賞は、一般社団法人日本機械学会において、「機械工業または広く産業社会に関わる主として技術上の業績をあげた個人」に与えられるものです。知能化ロボットにおいて、上位の管理モジュールに状態管理機能を持たせ、複数ハードウェアや機能モジュールの連携動作を実現する取り組みが評価され、本賞を受賞しました。被表彰者は、当社の茶谷晴利で、2025年4月24日に表彰式が行われました。以下に技術の概要を紹介します。
物流分野での人手不足を解消するため、物流倉庫で人手のかかるピッキング作業をロボットにより自動化するニーズが高まっています。高速な動作と多様な商品への対応を両立するには、複数のセンサや多関節アーム、ハンドといった、様々なハードウェアの連携が求められます。これに対し、各要素で発生したエラーがシステム全体に影響してロボットが停止する問題がありました。そこで、知能化ロボットの並列動作を考慮した状態管理技術を開発しました。上位の管理モジュールに状態管理機能を持たせ、下位のハードウェア制御をサブシステム化することで、エラーが発生しても動作を継続することが可能なシステムを構築しました。また、システムの状態を考慮したハードウェアの連携動作により、複数のタスクの並列制御を実現し、高速で緻密な動作を生成できます。
今後、より多様な知能化ロボットの動作生成へ展開し、幅広い現場での作業自動化の推進に貢献していきます。
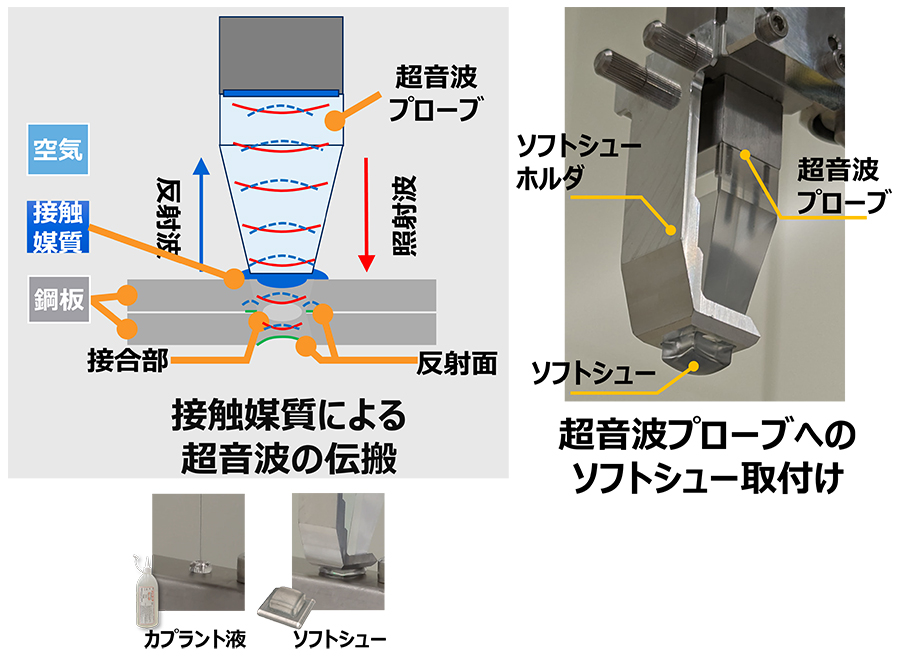
超音波カプラント液が不要なスポット溶接検査ロボットの開発で、SI2024優秀講演賞を受賞
公開日 2025年5月20日
- 知能化ロボット技術
本賞は、公益社団法人計測自動制御学会のシステムインテグレーション部門主催の第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)において、「優秀な研究講演を行った講演者」に対し与えられるものです。超音波検査におけるカプラント液の不要化という技術革新に関する講演が認められ、受賞につながりました。被表彰者は当社の齊藤真拡、東芝インフラシステムズ株式会社の岸伸享、東芝検査ソリューションズ株式会社の中村賢典で、2025年2月17日に受賞しました(所属は受賞当時のもの)。以下に技術の概要を紹介します。
スポット溶接は自動車車体の組立に不可欠な接合方式です。従来、溶接部の接合状態の検査は、熟練作業者による破壊検査が主流でした。東芝では、超音波非破壊検査装置Matrixeye™とロボット制御技術を組み合わせた自動検査ロボットを開発し、検査の省人化と信頼性向上を実現しています。
今回、自動検査ロボットにおいて、超音波の伝搬に必要な液状カプラント液に代わり、固体ゲル状の「ソフトシュー」を接触媒質として利用する技術を開発しました。これにより、カプラント液の塗布・除去作業が不要となるため、検査効率の大幅な向上が期待できます。
ソフトシューは、Matrixeye™専用に開発されたウレタンゲル素材で構成され、カプラント液の代替として超音波伝搬を実現します。発表では、自動車製品部品であるホワイトボディを用いた評価実験により、ソフトシューの適用性を示しました。ソフトシューでは、カプラント液使用時と比較し、一部測定値のばらつきが増加するものの、多くの条件で実用性のある測定結果が得られました。
今後、ソフトシューの形状や材質の改良を進め、さらなる実用性と信頼性の向上を図ります。
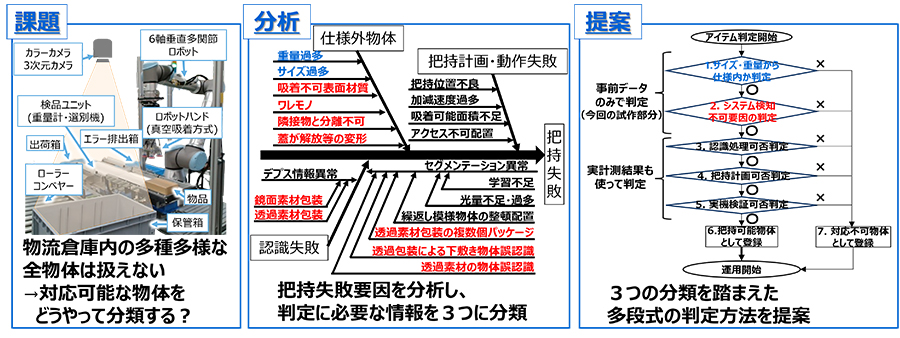
ピッキングロボットシステムにおける対象物体の把持可否判定機能の開発でSI2024優秀講演賞を受賞
公開日 2025年5月20日
- 知能化ロボット技術
本賞は、公益社団法人計測自動制御学会のシステムインテグレーション部門主催の第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)において、「優秀な研究講演を行った講演者」に対し与えられるものです。ピッキングロボットシステムに関連する把持可否判定機能の開発に関する講演が認められ、受賞につながりました。被表彰者は当社の十倉征司、古茂田和馬、田中淳也、紺田和宣、大賀淳一郎、小川昭人で、2025年2月17日に受賞しました。以下に技術の概要を紹介します。
近年、物流現場での人手不足を受け、作業の自動化や効率化が求められています。しかし、多種多様な物品を扱う物流現場作業においては全ての物品をロボットで扱うことが難しく、ロボットによる自動化を行う場合、ロボットで対応可能な物品と非対応な物品に仕分けする必要があります。そこで、本発表では倉庫内でのピッキング作業を対象に、ロボットが失敗する要因を分類し、分類結果を踏まえた多段式の判定方法を提案しました。加えて、一連の判定の一つである、ロボットに搭載したセンサで検知不可な要因に関する判定について、平易な質問文を利用者に回答してもらうことで簡易的に判定を行う機能を開発し、発表しました。
今後は、より高い判定精度の実現に向け技術開発を行い、ピッキングロボットシステムの現場投入に貢献していきます。
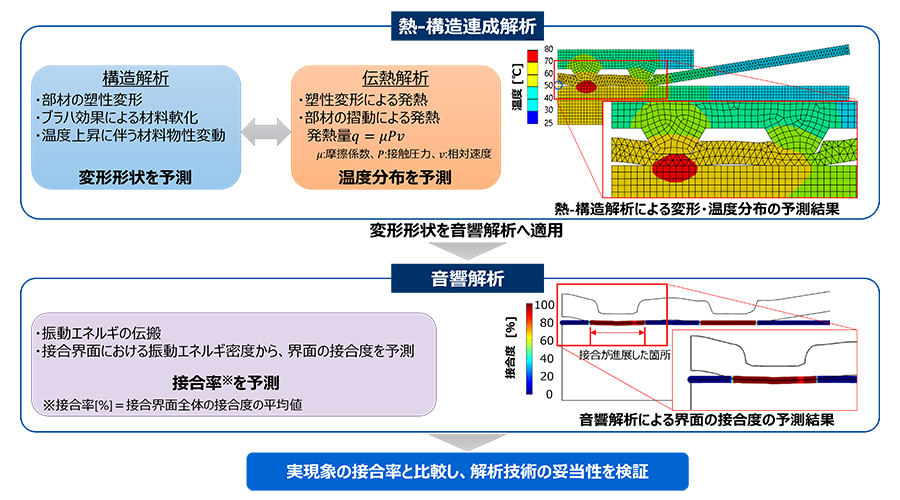
熱‐構造‐音響解析によるAl板の超音波接合挙動の予測技術開発で、Mate2025優秀論文賞(溶接学会)を
受賞
公開日 2025年3月5日
- 実装技術
本賞は、第31回「エレクトロニクスにおけるマイクロ接合・実装技術」シンポジウム(Mate2025)において、一般社団法人溶接学会より、「内容、実用性、発展性などの観点から総合的に優れた研究開発論文」に与えられるものです。従来、予測困難であった超音波接合挙動をシミュレーションにより予測する手法を提案した内容が評価され、今回の受賞となりました。被表彰者は当社の久保悠、相澤隆博、篠原勇人、東條啓で、授賞式は2025年1月29日に実施されました。以下に技術の概要を紹介します。
超音波接合は、アルミニウムなどの材料を超音波振動と圧力を加えて接合する方法であり、半導体や二次電池産業で広く使用されています。しかし、接合部の良否判断が難しく、接合条件の適正化に課題があります。そこで、本開発では、接合状態を予測し、試作なしで接合条件を最適化するための熱-構造-音響解析技術を開発しました。2枚のアルミ板の積層構造をモチーフとして、熱-構造解析により超音波接合中の変形と温度分布を予測し、音響解析により接合率を予測する手法を提案しました。予測した接合率は実現象と同等になることを確認し 、開発した手法の妥当性を示しました。
今後は、より実製品に近い構造に対する開発技術の適用を検討し、製品開発LTの短縮に貢献していきます。
複数種類の時系列作業情報を統合的に扱う作業推定手法で、情報処理学会DICOMO2024優秀論文賞を
受賞
公開日 2025年2月17日
- 生産エンジニアリング技術
本賞は、情報処理学会が主催するDICOMO2024において、「学術・技術の普及に貢献する優秀な論文を表彰する」ものです。このたび、作業に関連する各種時系列情報から作業内容を高精度に推定する手法の優位性が認められ、受賞につながりました。被表彰者は当社の大島宏友、福田雅允と共同研究先の大阪大学の前川卓也教授、東京都立産業技術大学院大学の浪岡保男教授です。授賞式は2024年9月20日に開催されました。以下に技術の概要を紹介します。
製造現場では、作業の進捗状況をタイムリーに把握し、計画に対する遅れの原因解明と改善施策により生産性を向上させています。しかし、複雑な組立作業では人手で行われる作業の進捗状況を自動で判定することは難しく、現状、作業者自身が進捗を記録するか、観測者を準備して進捗を記録しています。作業進捗を自動で把握することができると、作業者は作業に専念できるため、作業効率が向上します。また、観測者を準備する必要がなくなることで生産性の向上にもつながります。このため、作業内容を推定して進捗を自動で把握する技術の開発が求められています。
そこで、作業現場を撮影した映像に対して、GNN(Graph Neural Network)およびLSTM(Long Short Term Memory)を組み合わせて、複数の作業情報の時系列遷移から作業内容を推定する技術を開発しました。GNNはグラフ構造を定義することで、それらのつながりを考慮した学習をすることができます。また、LSTMは時系列的に変化する特徴を捉えて学習することができます。このモデルは、作業者の骨格位置、製品の組付け状態、および製品に対する作業者の両手作業箇所の情報から、各グラフのつながり関係とその時間的な変化を統合的に学習して推定することが可能です。実際の組立工程で行われた作業を撮影したデータで本手法を評価し、作業内容の推定精度が90%を超えることを確認しました。
今後、当社の国内外の工場に本技術・手法を適用し、生産性の更なる向上を図っていきます。