生産技術センター

生産技術トピックス
2024年
令和6年度 神奈川県技能者等表彰 技能検定推進優良事業所を受賞
公開日 2024年12月17日
- メカトロニクス技術
本賞は、神奈川県知事が技能検定の振興に貢献している事業所・団体を表彰するもので、広く社会一般に技能尊重気風を醸成し、技能者の地位向上及び技能習得意欲の高揚を図ることを目的としています。当センターでは、発足当初から人材育成に技能検定を活用しており、自社内で実技試験を実施できるよう、検定委員の確保と作業環境の構築を推進してきました。技能検定では主に生産設備の開発に必要となる、機械加⼯、仕上げ、機械検査、機械保全、電⼦機器組⽴て、シーケンス制御、テクニカルイラストレーション、機械・プラント製図などの職種を対象としています。入社時には2級レベルを目指すことで技能の門戸をたたき、数年後には1級レベルを目指すことで一人前となり、さらにその先には指導員を担当することで熟練者となります。毎年、多数の技能者が合格に向けて練習に励み、技能向上に努めています。このような活動が、技能検定を継続して推進し、他の模範になると評価いただきました。表彰式は、2024年11月13日に開催されました。
今後も技能検定の振興に寄与し、優秀な技能士の育成に努めてまいります。

面発光型量子カスケードレーザのフォトニック結晶高度化で日本赤外線学会 優秀発表賞を受賞
公開日 2024年11月19日
- 光応用・画像検査技術
本賞は、一般社団法人日本赤外線学会が主催する第33回研究発表会において、「優秀な研究発表を行った若手会員に対し賞を授与する」ものです。半導体中赤外光源開発への貢献が認められ、受賞につながりました。被表彰者は当社の宮川徹也で、2024年10月11日に表彰式が行われました。以下に技術の概要を紹介します。
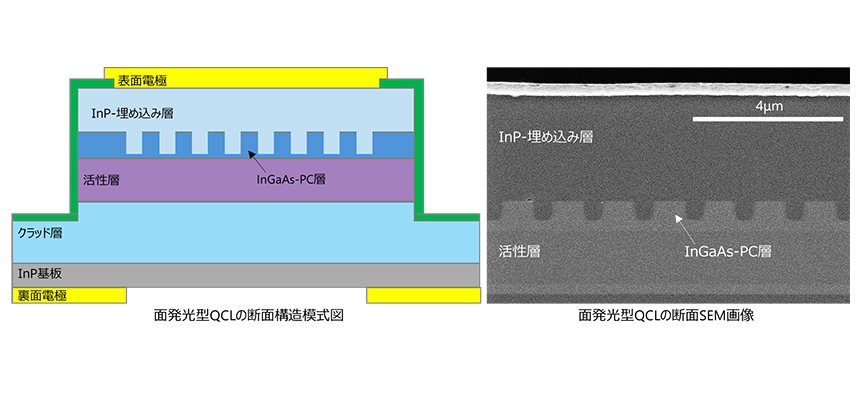
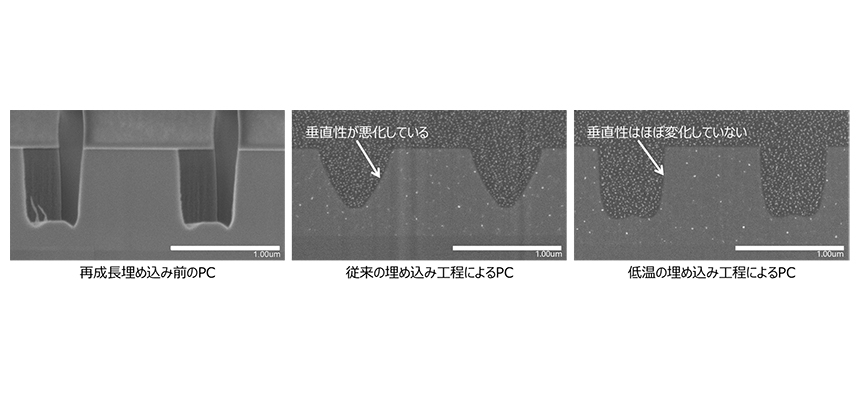
カーボンニュートラル社会においてCO2をはじめとする様々な温室効果ガスの検出の重要性が高まっており、様々な分子の吸収スペクトルが存在する波長域である中赤外光による分析手法が注目されています。当社では、高出力化を可能にする面発光型の中赤外量子カスケードレーザ(QCL)の開発を進めています。QCLを面発光型にするためにフォトニック結晶(PC)を用いますが、PCの形状崩れによる出力低下が課題となっています。今回、PCの断面SEM観察により形状崩れには、再成長埋め込み工程の温度が大きく影響することを見出しました。そこで、埋め込み手法を従来のMOCVD法*1)から、低温化が可能なMBE法*2)に変更する検討を行いました。一般にMBE法で埋め込みを行うと結晶性の低下が懸念されますが、PC形状に合わせた成長速度の最適化などにより、形状崩れの抑制と高い結晶性の両立に成功しました。
今後、形状崩れの抑制による光出力向上効果を検証するとともに、再成長埋め込み手法のロバスト性を高めることで、遠隔ガス検知に向けた中赤外光源の開発を進めていきます。
*1) Metal Organic Chemical Vapor Deposition:有機金属気相成長法、有機金属化合物をウェハ上で熱で分解する成膜手法
*2) Molecular Beam Epitaxy:分子線エピタキシー法、超高真空中で原料を分子線として発生させてウェハに照射する成膜手法
謝辞
本研究は、防衛装備庁 安全保障技術研究推進制度 JPJ004596の支援と、文部科学省 ナノテクノロジープラットフォーム事業JPMXP09F21IT0002の支援を受けて実施しました。
実装基板設計に適用可能な深層学習技術の開発でエレクトロニクス実装学会 第38回春季講演大会
研究奨励賞を受賞
公開日 2024年10月23日
- 電子機器パッケージング技術
本賞は、一般社団法人エレクトロニクス実装学会が主催する第38回エレクトロニクス実装学会講演大会において、「学術的に優れた講演を行った若手発表者を表彰する」ものです。この度、少数の学習データを用い深層学習モデルの予測精度を向上させた手法の将来性が認められ、受賞につながりました。被表彰者は当社の清水嵩宥です。表彰式は2024年9月に開催されました。以下に技術の概要を紹介します。
実装基板の設計では、耐用年数などの製品仕様が目標を満たしているかを確認するためにシミュレーションを行いますが、結果を得るまでに数日から数週間かかることが課題です。そこで、深層学習モデルを用いて数秒でシミュレーション結果を予測する手法を開発しました。この手法では、学習データセットの分布を改善することで、少数のデータからでも高精度な予測が可能となり、基板上の電子部品の配置設計を瞬時に評価できます。これにより、限られた開発期間内により多くの設計案を比較検討し、最も信頼性の高い部品配置を得ることができます。
今後、様々な製品の基板設計に適用し、さらなる品質向上に貢献していきます。

「複数同時把持可能なバラ積みピッキング動作生成技術の開発」で
2023年度日本機械学会奨励賞(技術)を受賞
公開日 2024年6月18日
- 知能化ロボット技術
本賞は、一般社団法人日本機械学会において、「機械工業または広く産業社会に関わる主として技術上の業績をあげた個人」に与えられるものです。物流作業の自動化に向けたロボットの適切な把持位置姿勢を算出する動作生成技術の高速性や、複数同時把持の効果が評価され、本賞を受賞しました。受賞者は、当社の姜平で、2024年4月18日に表彰式が行われました。以下に技術の概要を紹介します。
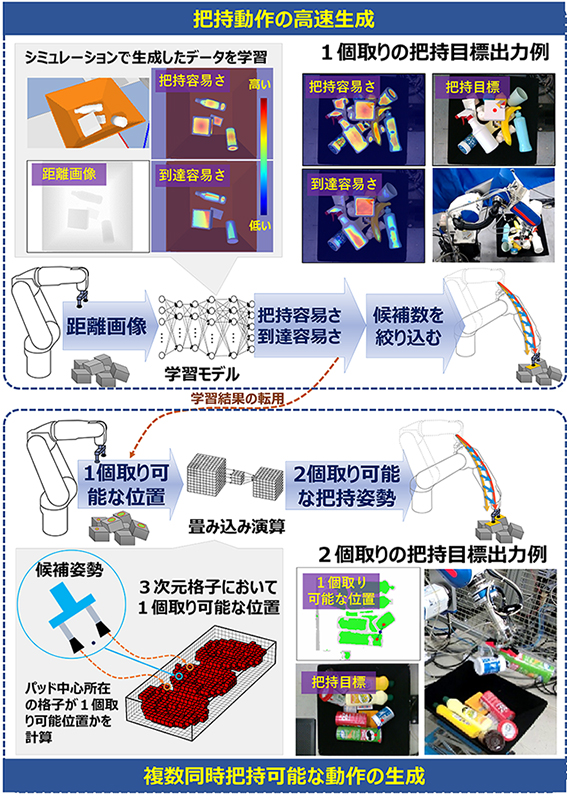
物流分野での人手不足を解消するため、物流倉庫で多用されるピッキング作業をロボットにより自動化するニーズが高まっています。乱雑に置かれている対象物をロボットで大量かつ高速に把持することが求められますが、適切な動作の生成に膨大な時間を要する問題がありました。そこで、ロボットが対象物を把持するときの安定性(把持容易さ)と、周囲物体と衝突するリスク(到達容易さ)を同時に考慮可能な深層学習モデルを構築しました。学習モデルの推論結果に基づき、把持困難な候補を除外することにより動作計算を高速化しました。また、計算結果を利用し、複数の対象物を同時に把持可能な動作を生成し、実機ロボットの単位時間あたりの把持個数を増加させることができました。
今後、より多様なロボット動作の高速自動生成へ展開し、幅広い現場での作業自動化の推進に貢献していきます。
作業者の特徴的な動作を識別してラベリングする自己教師あり学習手法の開発で
WIP Best Paper Awardを受賞
公開日 2024年5月21日
- 生産エンジニアリング技術
本賞は、IEEEが主催するPerCom2024において、「最も斬新で革新的なアイデアに基づく初期研究、および進行中の研究を表彰する」ものです。作業者の特徴的な動作を自動で識別してラベリングする自己教師あり学習手法の革新性が認められ、受賞につながりました。被表彰者は当社の大島宏友、福田雅允、浪岡保男(現 東京都立産業技術大学院大学教授)と共同研究先の大阪大学のQingxin Xiaさん、前川卓也准教授、Jaime Moralesさん、原隆浩教授です。授賞式は2024年3月14日に開催されました。以下に技術の概要を紹介します。
ウェアラブルセンサから取得したデータを用いて作業認識を行う場合、事前に教師ラベルを付与して学習を行いますが、教師ラベルを付与する作業に多くのコストがかかることが課題となっています。そのため、ラベル付けされていないデータを効果的に利用する自己教師あり学習の検討が進められていますが、梱包作業のような複雑な作業では、作業対象に応じて観測データが大きく異なるため、自己教師あり学習の適用が困難でした。
そこで、作業者の特徴的な動作を識別してラベリングする新たな自己教師あり学習手法を開発しました。この手法では、作業内における特徴的な動作に対応するセンサデータに着目し、その特徴的な動作の発生を識別するためのニューラルネットワークを構築しています。実作業データで評価を実施したところ、従来の自己教師あり学習の性能を上回ることを確認しました。
本手法を適用することで、AI学習に必要なラベリング作業にかかっていた多くのコストを低減させることが可能となり、生産性向上が実現します。今後、更なるモデルの改良を進め、様々な作業へ本手法を適用できるように汎用性を高めていきます。

金属/樹脂界面の剥離評価手法の開発でMate2024奨励賞(溶接学会)を受賞
公開日 2024年3月21日
- 実装技術
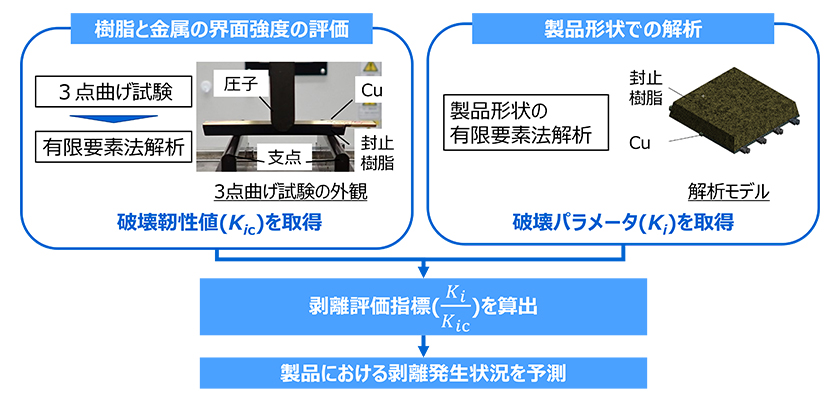
本賞は、第30回「エレクトロニクスにおけるマイクロ接合・実装技術」シンポジウム(Mate2024)において、一般社団法人溶接学会より、「今後の生産技術・接合技術に対して貢献すると期待される、学術的・工学的に優れた技術開発を行った若手研究者」に与えられるものです。従来、予測困難であった金属と樹脂の界面剥離現象の予測手法を提案した内容が評価され、今回の受賞となりました。被表彰者は当社の松尾圭一郎で、授賞式は2024年1月24日に実施されました。以下に技術の概要を紹介します。
半導体パッケージでは、電気的絶縁や半導体チップの汚染を抑制するための封止樹脂が、電極となる金属部材から剥離すると信頼性が大きく低下する問題があります。そこで、本開発では、樹脂と金属の界面強度を材料試験とシミュレーションによって求め、実製品で生じる応力集中部の状態を破壊力学パラメータで評価する手法を提案しました。さらに、提案手法により、実製品の剥離発生を予測できることを確認し、手法の妥当性を示しました。今後は、材料データの拡充と解析精度の向上を図り、製品開発に適用して信頼性の高い製品の早期上市に貢献していきます。
製造プロセスのシミュレーションで日本機械学会のフェローに認定
公開日 2024年3月6日
- 知識・情報システム技術
日本機械学会フェローは、一般社団法人日本機械学会において、機械及び機械システムとその関連分野に顕著な貢献をなした会員に与えられる称号です。製造プロセスのシミュレーション開発とその量産適用に携わってきた貢献が認められ、フェロー認定されました。被認定者は当社の中川泰忠で、2024年2月に認定証と徽章を授与されました。以下に技術の概要を紹介します。
対象としてきた製造プロセスは構造、流動、伝熱、電磁気など複数の物理現象が関与しており、製造プロセス中で素材の形状や相状態が変化するなど複雑で、既存のシミュレーションツールだけでは対応できない場合がありました。これらの現象に対しシミュレーション手法を開発・適用して、製造プロセス最適化、製造性を考慮した製品設計、装置設計を実施してきました。
【被認定者から一言】
今後、上記知見をMBSE*1)/MBD*2)分野にも展開していきたいと考えています。
*1) Model Based Systems Engineering:システムの要求分析や設計、検証を、各種モデルを用いて実施する手法
*2) Model Based Development:メカや電気など複数の技術分野から構成されるシステムの機能成立性を、シミュレーションモデルを用いて評価する手法
物流センターにおけるピッキングの移動距離を適正化するオーダーの組合せに関する論文がACMSA2023で「Excellent Paper of Industry-Academia Collaboration Forum」を受賞
公開日 2024年2月22日
- 生産エンジニアリング技術
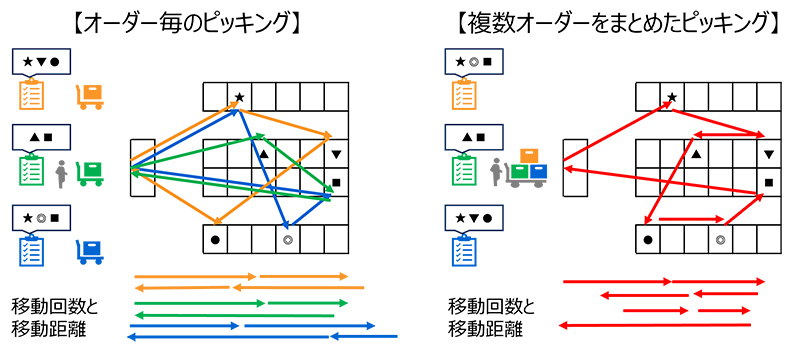
ACMSA(The Asian Conference of Management Science and Applications)が主催する ACMSA 2023において発表した、物流倉庫で複数オーダーを組み合わせてピッキング作業者に割り当てる問題の解法が、優れた論文として認められ、本賞を受賞しました。受賞者は当社の田中貴、杉山尚美と共同研究先の上智大学の野口瑠音さん、伊呂原隆教授です。授賞式は2023年12月に開催されました。以下に研究の概要を紹介します。
物流倉庫では商品の入荷から保管・ピッキング(倉庫内にある保管商品の中から指示にそって商品を集める)・梱包・出荷の業務があり、業務全体の50%を占めるピッキング、特に作業者の移動距離を減らすことが課題の1つです。移動距離の削減には複数のオーダーをまとめてピッキングすることが有効であると考え、商品の配置を意識したオーダーの組み合わせ(バッチング問題)とピッキング時の移動経路(ルーティング問題)を同時に考慮して総移動距離を適正化する近似解法を提案しました。本解法はタブーサーチ法をベースとしたヒューリスティックモデルで、数理最適化ソフトでは実行可能解が得られない規模のデータでも解を得ることができます。また、通路間距離も考慮することが計算時間の短縮に有効であることを示しました。今後は解の分析を踏まえてモデルの改善を図っていきます。