
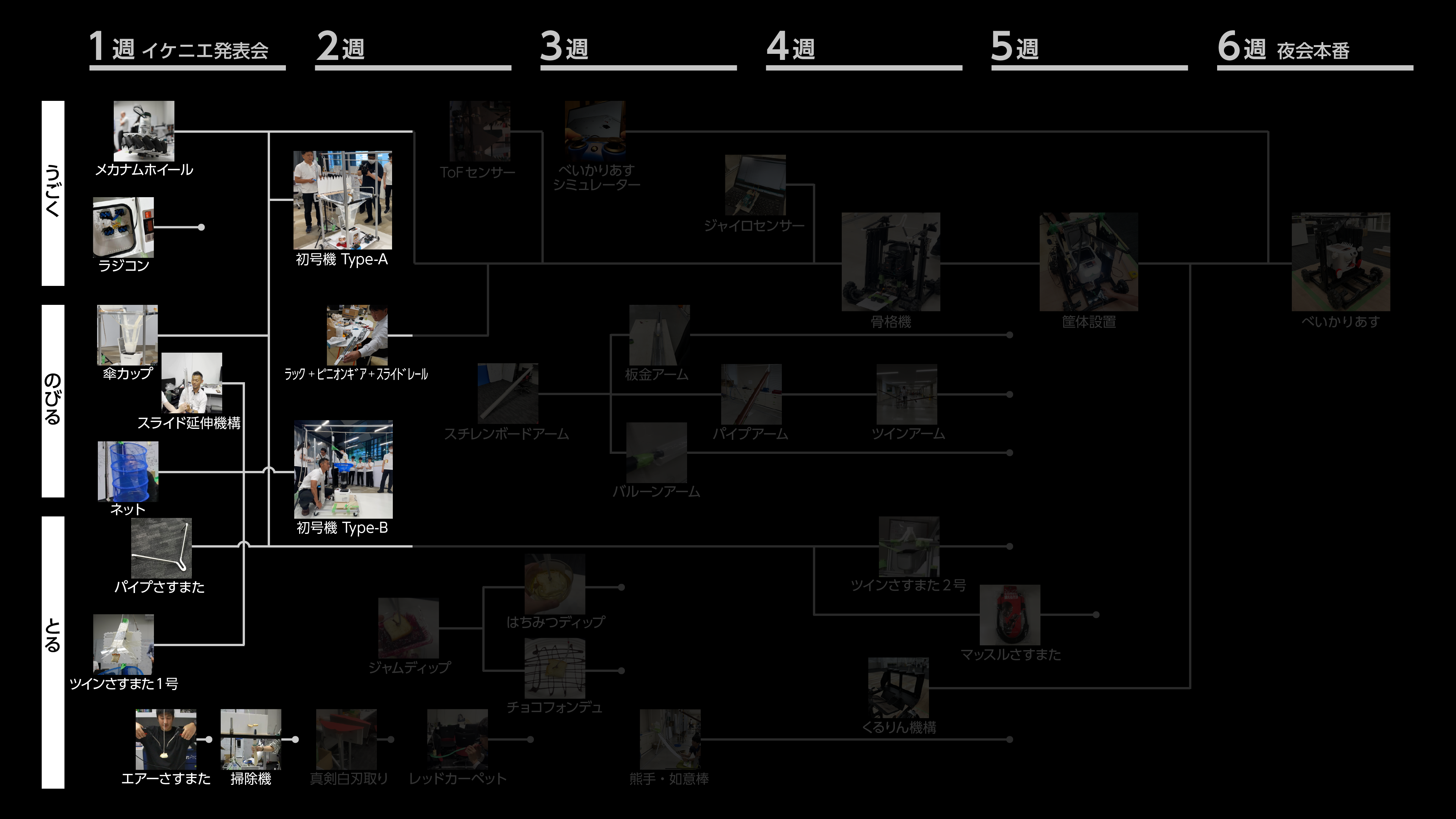
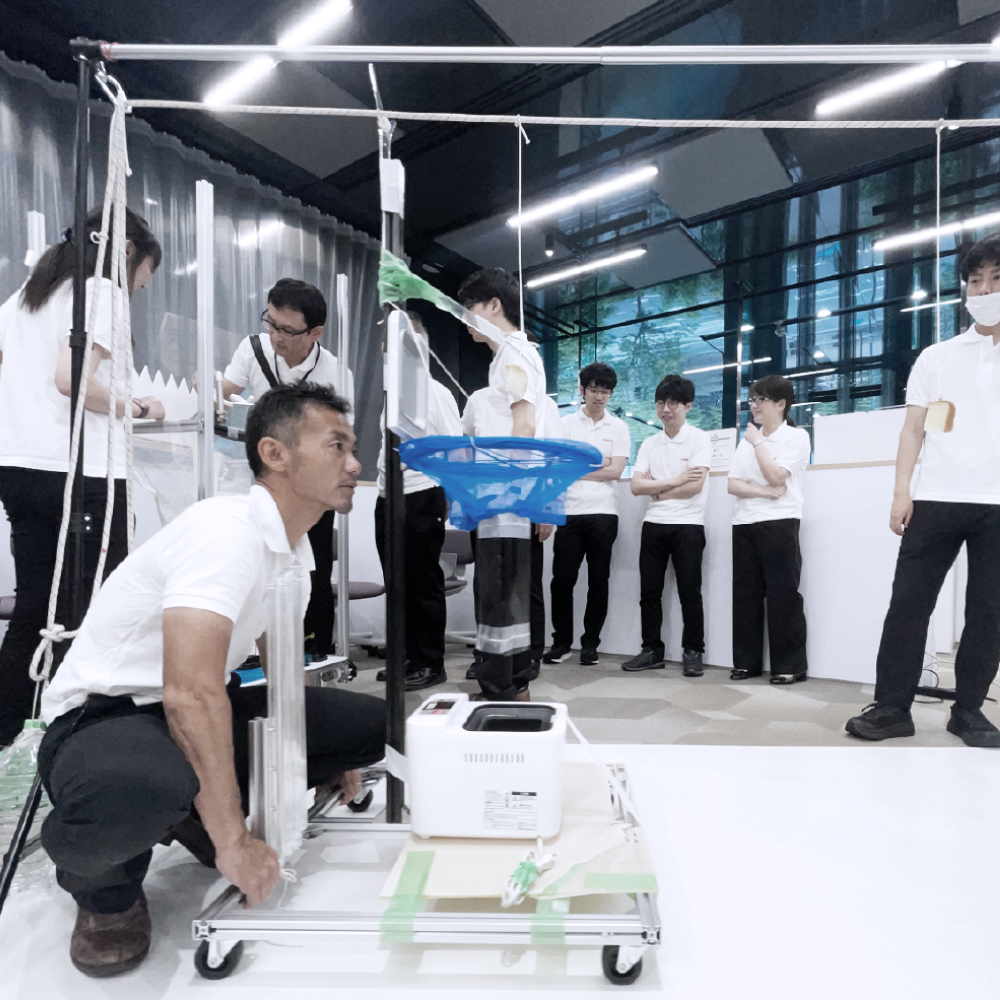
べいかりあす開発の歴史
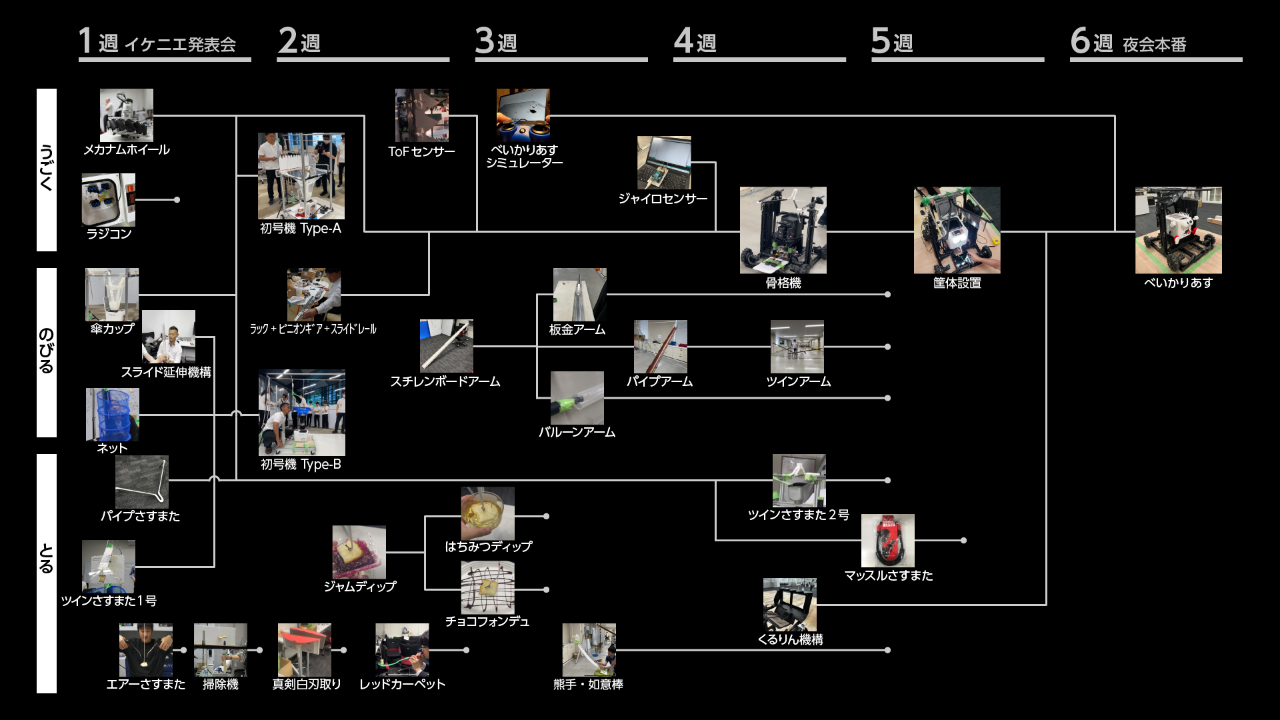
家電チームの開発工程はA,Bのふたチームに分かれてプロトタイプを行った初期、フィールドを走り回ってパンを食べる王道班と、より面白く食べる案を検討する覇道班に分かれて開発を行った中期、王道班の案の作りこみにチーム全員で取り組んだ後期の3期に大別できる。
開発初期
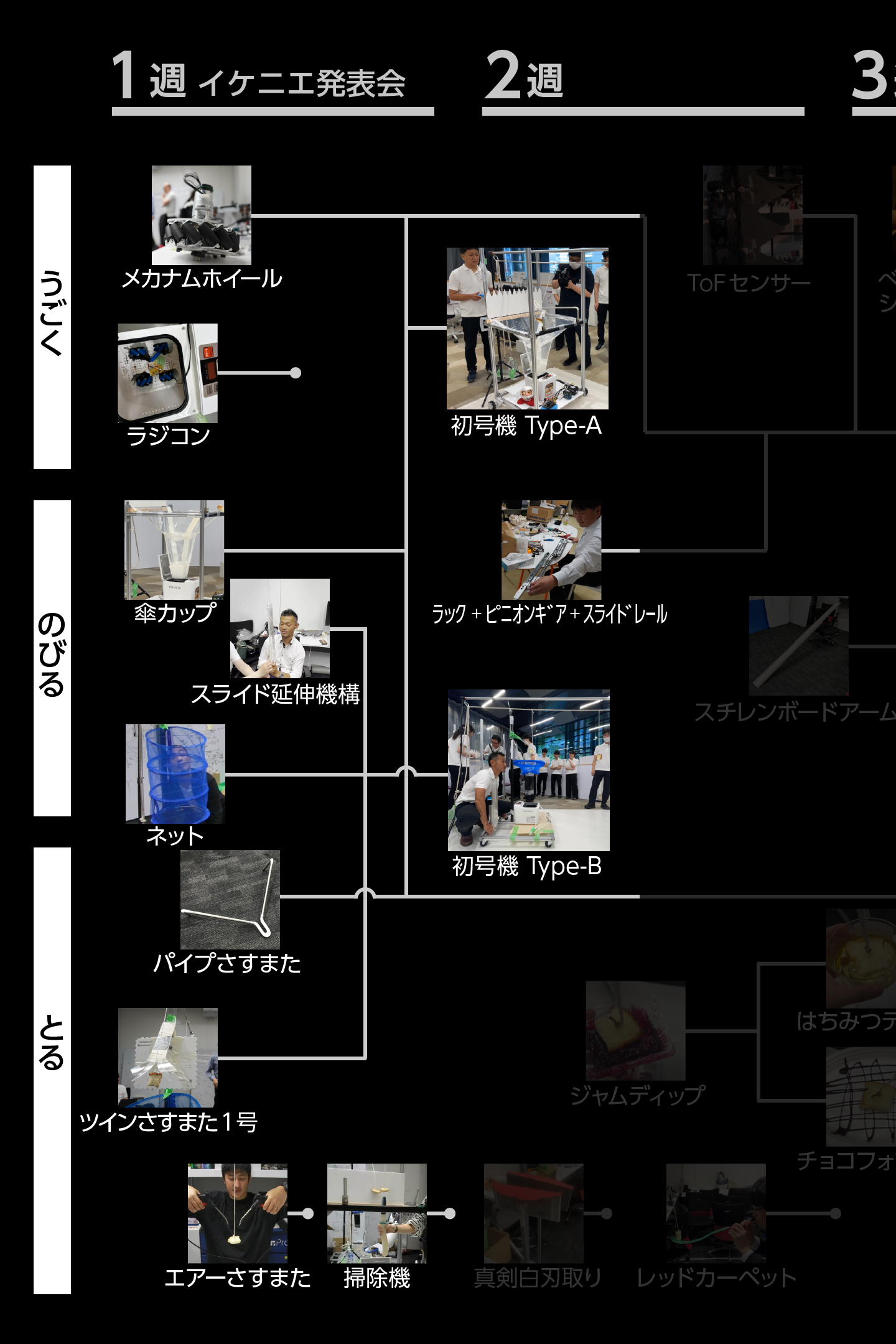
Aチームにメカナムホイールを使ったロボットを作ったことがあるメンバーがいたことから、足回りは概ね方針が見えていた。そこで他のメンバーは足回り以外の機能についてプロトタイプを作ることとなり、機能ごとにバランスよく検討がなされた。結果として、検討した機能を組み合わせた2台の初号機が完成することとなった。奇しくも、さすまたでパンを落として、下の釜でキャッチするという方針は共通だった。両チームとも、高い位置のパンを取る機能は未実装であったが、プロトタイプ発表会の時点で概ねひとつの解にたどり着いていた。
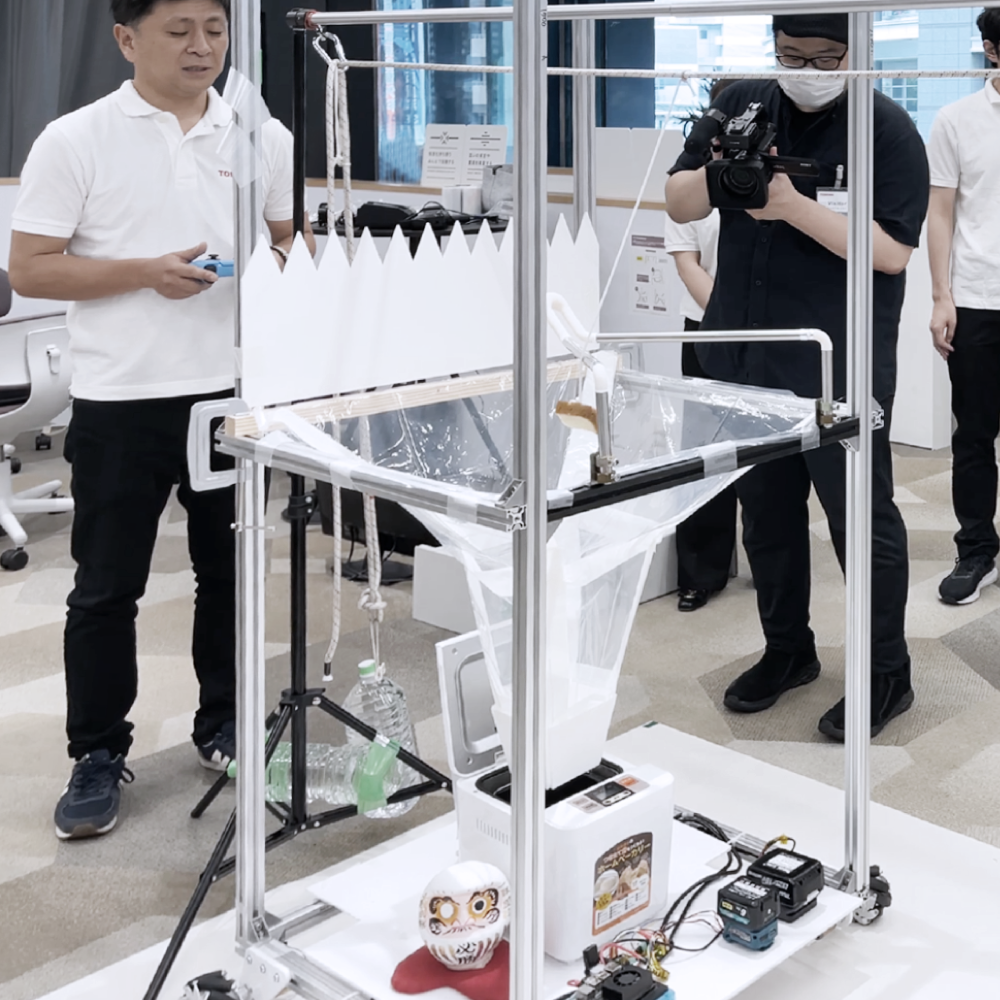
初号機 Type-A
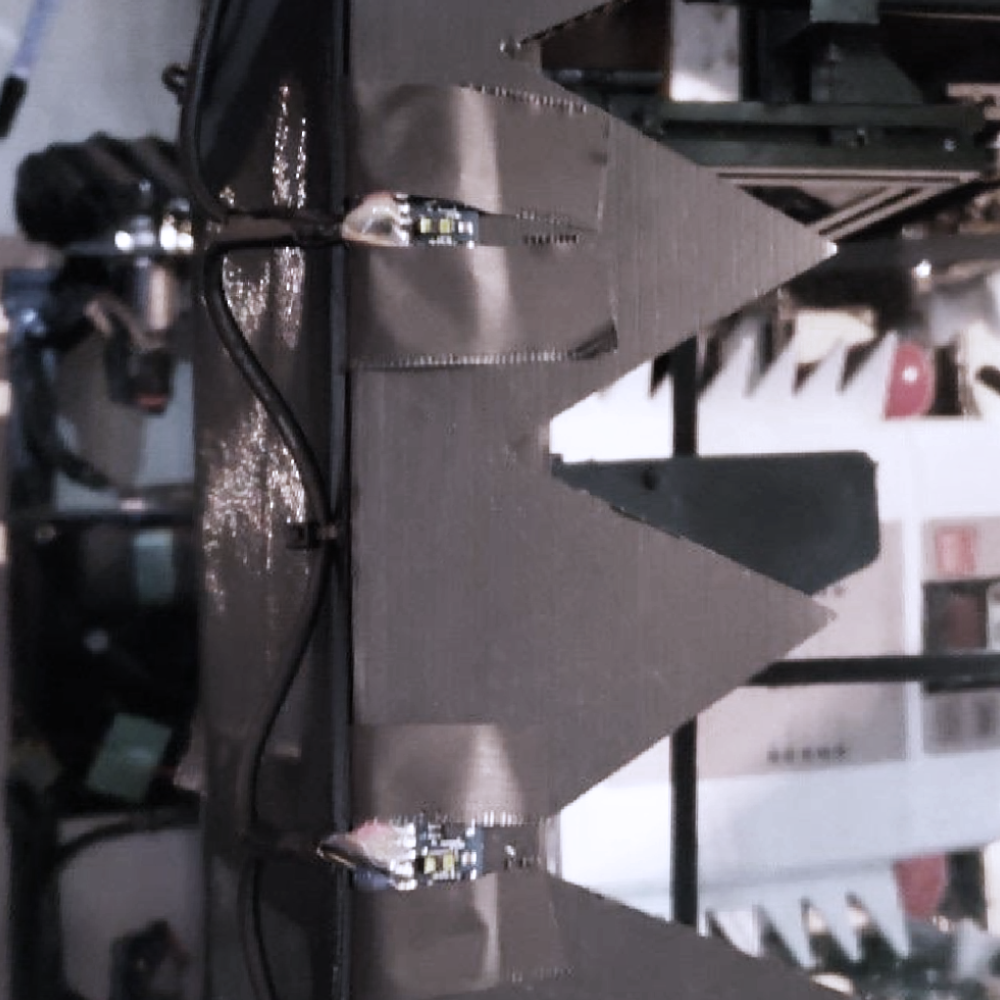
コントローラーを使ったメカナムホイールを用いた本体の操作が、この時点で一部できていた。上部には3Dプリンタを用いて作製したさすまたが取り付けられており、紐につるされたパンを本体の中央まで引き寄せ、引っかけて落とすという構想だった。後方には引っかけたパンが飛んでいかないように牙を模したガードが、落としたパンが釜の外にこぼれないようにビニール傘を改造した漏斗形状のガードが、それぞれ取り付けられた。足回りと、パンを取る方式はべいかりあすに引き継がれている。
初号機 Type-B
TypeAと基本コンセプトは同等。パンをつるす紐をしたから挟み、その揺れを防止するさすまたと、パンを落とすために前向きに設置されたさすまたのツインさすまたが特徴的だった。紐を受ける部分には滑車がつけられるなどの工夫がなされていた。パンが釜の外に零れるのを防ぐガードには、干物を作る際に使われるネットが流用された。結合には至っていなかったものの、アクリル板を切り抜いてつくられたスライド延伸機構のプロトタイプも製作され、この機構はべいかりあすのZ駆動機構に引き継がれている。
開発中期
プロトタイプ発表会の結果を受けて、現状の「本体がフィールドを走り回ってパンを集める」というコンセプトを形にする王道チームと、走行時間を短縮することを目的として「腕を左右に広げて、全てのパンを一気に回収する」というコンセプトをはじめとした、可能性の拡大を検討する覇道チームに別れて、それぞれ開発を進めることとなった。この期間は特に覇道チームにおいて、多くのプロトタイプが作られた。それは実現性が高いとみられていた王道チームに、納得してもらう案である必要があったためである。

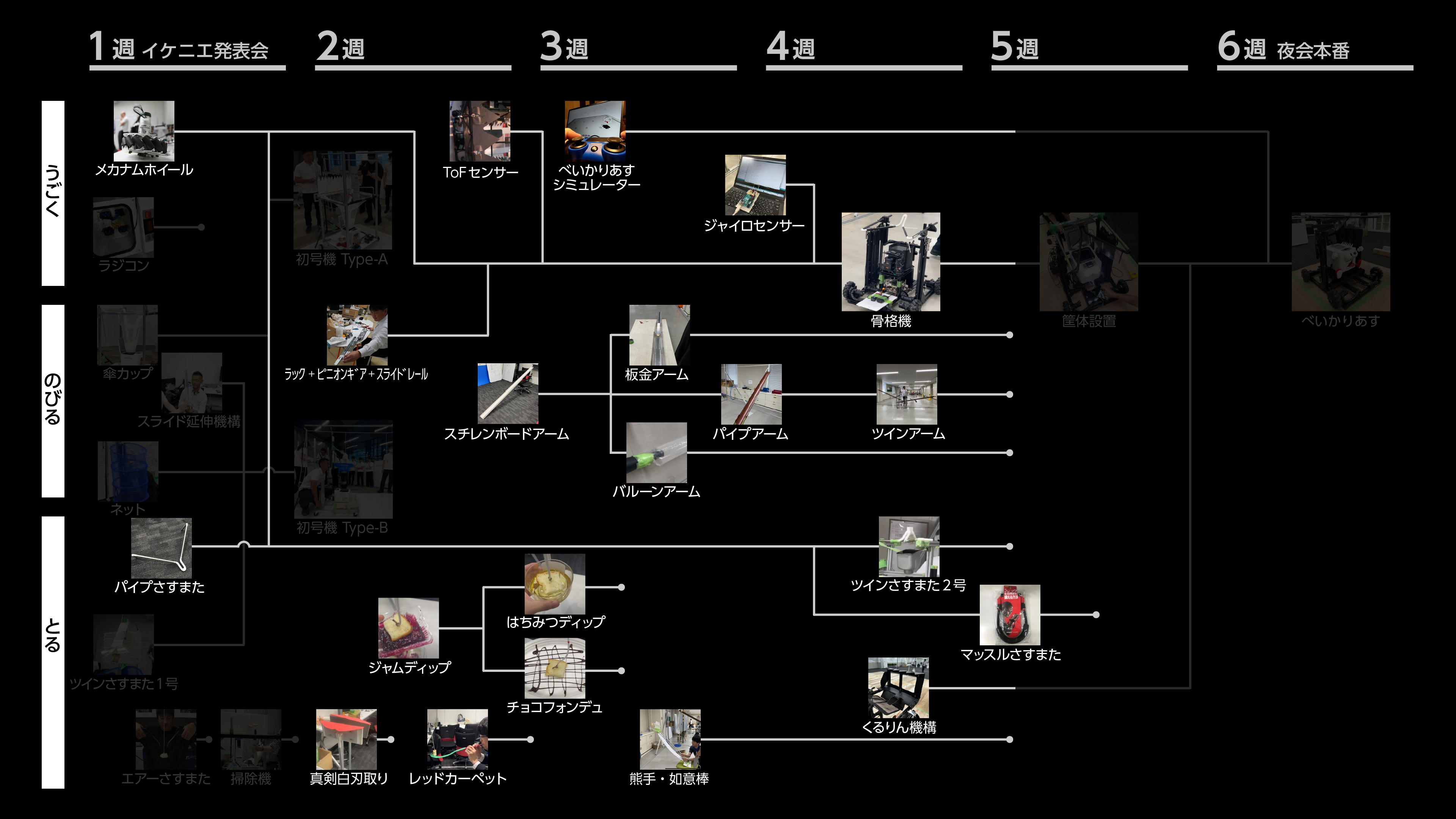
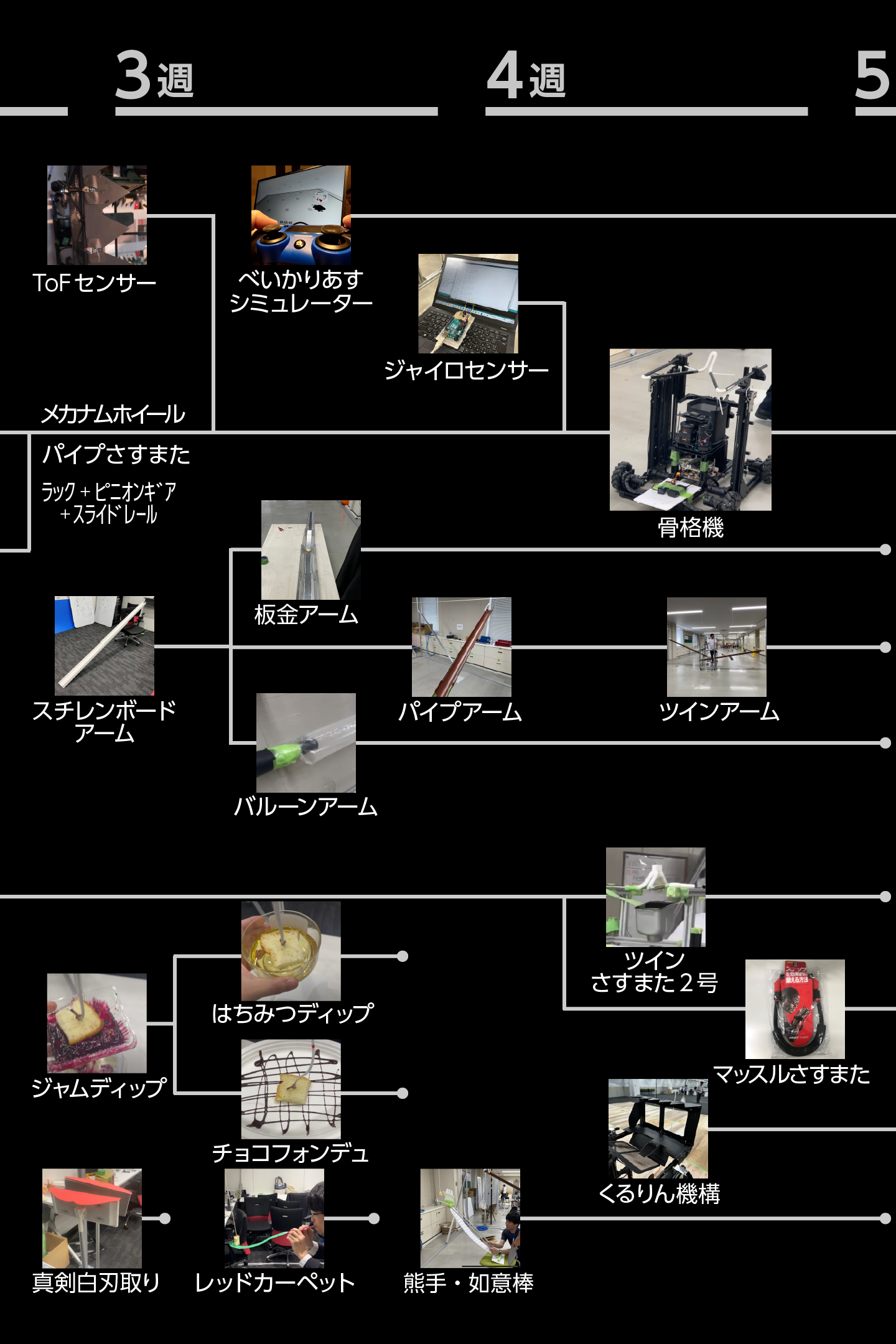
べいかりあすシミュレーター
実機を使った練習期間を確保できない可能性が高かった。そのため、コントローラーの操作に慣れることを目的としたシミュレーターが作られた。実際には操作の練習だけではなく、走行ルートや回転する場所など、最適なルートの検討と、それを実現するための動作シーケンスの検討にも活用された。実機完成前に先んじてこれらの検討ができたことは、大きなインパクトがあった。
センサーフュージョン
べいかりあすの足回りは4つのメカナムホイールで構成されている。メカナムホイールは走行の自由度が高い一方で、まっすぐ進むことが難しいという難点があった。それをカバーするため、様々なセンサーによる姿勢制御を試した。最終的にはToFセンサーを用いて上方のロープを監視して自身の位置を、ジャイロセンサーを用いて自身の姿勢を、それぞれ計測してフィードバック制御するセンサーフュージョンで直進性を実現した。

アーム方式
フィールド上を走り回る方式は走行距離が長くなり、それなりの走行スピードが必要となる。そこで走行距離を減らして短時間でパンを取得する方法として、両腕を伸ばした状態で中央ラインを走り、3つの高さのパンをまとめて取る”アーム式”を検討した。アームの材料、アームを展開させる方法、パンを中央に寄せる方法など、実現に向けた様々な検討が行われた。しかし、王道チームが開発していたべいかりあすの走行スピードが、十分に担保できることが判明し、開発は休止となった。

ディップ方式
「美味しくパンを食べる」という点にこだわり、ジャムを塗ることでパンを取り、取ったパンがジャムパンになっているというアイデアも試した。ジャムの他、チョコレート、ハチミツ、オリーブオイルなどまじめに検討を行った。アイデアとしてはユニークであったが、パン食い競争の趣旨からずれるとの意見から実現には至らなった。

熊手方式
さすまた方式でパンを取る場合、ある程度本体の中央にパンが来るように、べいかりあすを操作する必要がある。そこで、パンを取る部分を熊手のような形にして、パンを取ることができる範囲を増やす案を考えた。これによってパンを取り逃すリスクを抑えられる。しかし、スタート時に70cm以内にすることが難しいという判断から採用には至らなかった。
開発後期
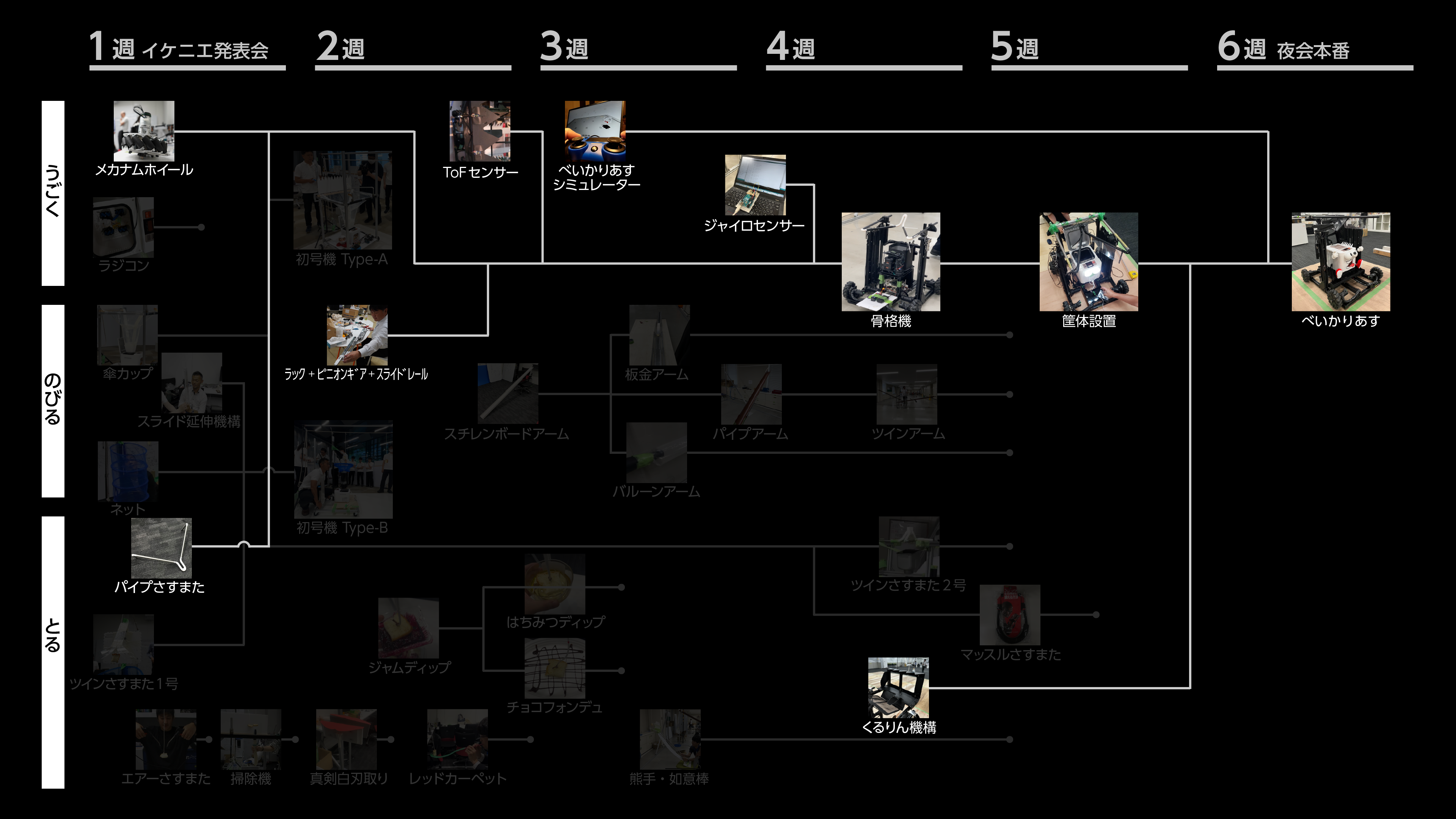
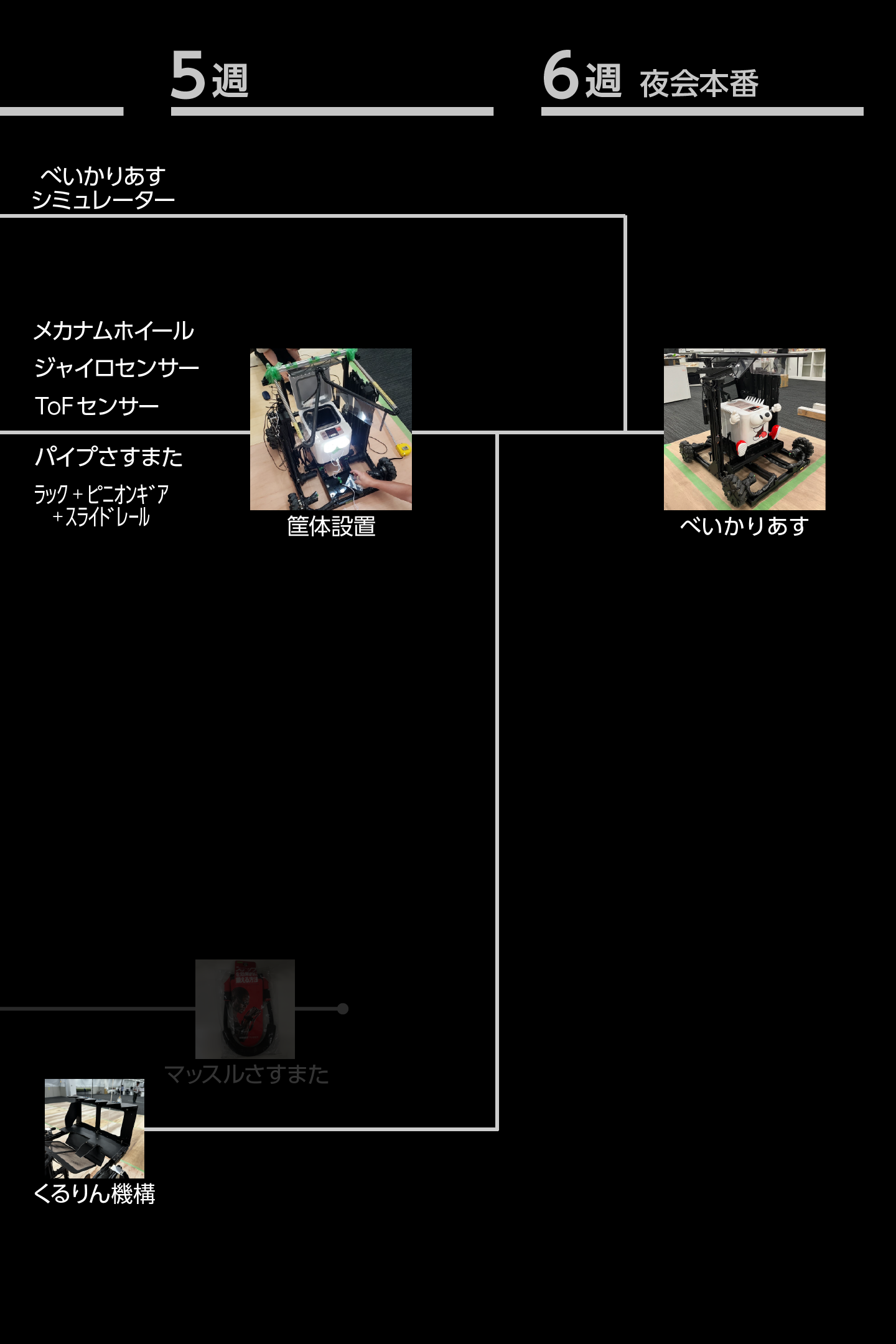
後期では当初の想定より困難な「釜自体を持ち上げて本体でパンを取る」構造に取り組んでいた王道チームにメンバーを集結。総力を結集してべいかりあすを仕上げた。

べいかりあす
初期の段階からアップデートが繰り返されていた「メカナムホイールの足回り」「スライドレールを活用したZ駆動機構」「つるされたパンを取る独自形状のさすまた」を搭載したべいかりあすのベースが完成した。ホームベーカリーを載せたうえで更なるアップデートを行い、「センサーをロープに近づけるくるりん機構」や「センサーフュージョン」を追加で搭載。ホームベーカリーに命が吹き込まれ、美食魔物べいかりあすが完成した。